Page is loading ...

MANUAL NO.
HW0482143 8
YASKAWA ELECTRIC CORPORATION
MOTOMAN-ES200RN
INSTRUCTIONS
TYPE: YR-ES200RN-A00 (STANDARD SPECIFICATION)
YR-ES200RN-A01 (SLU-AXES WITH L.S. SPECIFICATION)
Upon receipt of the product and prior to initial operation, read these instructions thoroughly, and retain
for future reference.
MOTOMAN INSTRUCTIONS
MOTOMAN-ES200RN INSTRUCTIONS
NX100 INSTRUCTIONS
NX100 OPERATOR’S MANUAL
NX100 MAINTENANCE MANUAL
The NX100 operator’s manual above corresponds to specific usage.
Be sure to use the appropriate manual.
1/71
Part Number: 149539-1CD
Revision: 2

ii
HW0482143
• This instruction manual is intended to explain operating instructions
and maintenance procedures primarily for the MOTOMAN-ES200RN.
• General items related to safety are listed in Section 1: Safety of the
NX100 Instructions. To ensure correct and safe operation, carefully
read the NX100 instructions before reading this manual.
• Some drawings in this manual are shown with the protective covers or
shields removed for clarity. Be sure all covers and shields are replaced
before operating this product.
• The drawings and photos in this manual are representative examples
and differences may exist between them and the delivered product.
• YASKAWA may modify this model without notice when necessary due to
product improvements, modifications, or changes in specifications. If
such modification is made, the manual number will also be revised.
• If your copy of the manual is damaged or lost, contact a YASKAWA rep-
resentative to order a new copy. The representatives are listed on the
back cover. Be sure to tell the representative the manual number listed
on the front cover.
• YASKAWA is not responsible for incidents arising from unauthorized
modification of its products. Unauthorized modification voids your prod-
uct’s warranty.
MANDATORY
CAUTION
2/71
HW0482143

iii
HW0482143
Notes for Safe Operation
Read this manual carefully before installation, operation, maintenance, or inspection of the
NX100.
In this manual, the Notes for Safe Operation are classified as “WARNING”, “CAUTION”,
“MANDATORY”, or “PROHIBITED”.
Even items described as “CAUTION” may result in a serious accident in some situations. At
any rate, be sure to follow these important items.
Indicates a potentially hazardous situation which, if not avoided,
could result in death or serious injury to personnel.
Indicates a potentially hazardous situation which, if not avoided,
could result in minor or moderate injury to personnel and dam-
age to equipment. It may also be used to alert against unsafe
practices.
Always be sure to follow explicitly the items listed under this
heading.
Must never be performed.
To ensure safe and efficient operation at all times, be sure to follow all instructions, even if
not designated as “CAUTION” and “WARNING”.
WARNING
CAUTION
MANDATORY
PROHIBITED
NOTE
3/71
HW0482143

iv
HW0482143
• Before operating the manipulator, check that servo power is turned off
when the emergency stop buttons on the front door of the NX100 and
programming pendant are pressed.
When the servo power is turned off, the SERVO ON LED on the program-
ming pendant is turned off.
Injury or damage to machinery may result if the emergency stop circuit cannot stop the
manipulator during an emergency. The manipulator should not be used if the emergency
stop buttons do not function.
Emergency Stop Button
• Once the emergency stop button is released, clear the cell of all items
which could interfere with the operation of the manipulator. Then turn
the servo power ON.
Injury may result from unintentional or unexpected manipulator motion.
Release of Emergency Stop
• Observe the following precautions when performing teaching operations
within the P-point maximum envelope of the manipulator :
- View the manipulator from the front whenever possible.
- Always follow the predetermined operating procedure.
- Ensure that you have a safe place to retreat in case of emergency.
Improper or unintended manipulator operation may result in injury.
• Confirm that no persons are present in the P-point maximum envelope of
the manipulator and that you are in a safe location before:
- Turning on the NX100 power
- Moving the manipulator with the programming pendant
- Running check operations
- Performing automatic operations
Injury may result if anyone enters the P-point maximum envelope of the manipulator dur-
ing operation. Always press an emergency stop button immediately if there are prob-
lems.The emergency stop button is located on the right of front door of the NX100 and the
programming pendant.
WARNING
TURN
4/71
HW0482143

v
HW0482143
Definition of Terms Used Often in This Manual
The MOTOMAN manipulator is the YASKAWA industrial robot product.
The manipulator usually consists of the controller, the programming pendant, and supply
cables.
In this manual, the equipment is designated as follows:
• Perform the following inspection procedures prior to conducting manip-
ulator teaching. If problems are found, repair them immediately, and be
sure that all other necessary processing has been performed.
-Check for problems in manipulator movement.
-Check for damage to insulation and sheathing of external wires.
• Always return the programming pendant to the hook on the NX100 cabi-
net after use.
The programming pendant can be damaged if it is left in the P-point maximum envelope
of the manipulator, on the floor, or near fixtures.
• Read and understand the Explanation of Warning Labels in the NX100
instructions before operating the manipulator.
Equipment Manual Designation
NX100 Controller NX100
NX100 Programming Pendant Programming Pendant
Cable between the manipulator and the controller Manipulator cable
CAUTION
5/71
HW0482143

vi
HW0482143
MOTOMAN
TYPE
ORDER NO.
PAYLOAD
kg MASS
kg
SERIAL NO.
DATE
YASKAWA ELECTRIC CORPORATION JAPAN
Explanation of Warning Labels
The following warning labels are attached to the manipulator.
Always follow the warnings on the labels.
Also, an identification label with important information is placed on the body of the manipula-
tor. Prior to operating the manipulator, confirm the contents.
WARNING label A
WARNING label A
Nameplate
WARNING label B
WARNING
Do not enter
robot
work area.
WARNING label A WARNING label B
WARNING
Moving parts
may cause
injury
Nameplate:
MOTOMAN
TYPE
ORDER NO.
PAYLOAD
kg MASS
kg
SERIAL NO.
DATE
YASKAWA ELECTRIC CORPORATION JAPAN
6/71
HW0482143

vii
HW0482143
1 Product Confirmation
1.1 Contents Confirmation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1.2 Order Number Confirmation . . . . . . . . . . . . . . . . . . . . . . . 1-2
2 Transporting
2.1 Transporting Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.1.1 Using a Crane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-1
2.2 Shipping Bolts and Brackets. . . . . . . . . . . . . . . . . . . . . . . 2-3
3 Installation
3.1 Installation of the Safeguarding. . . . . . . . . . . . . . . . . . . . 3-2
3.2 Mounting Procedures for Manipulator Base . . . . . . . . 3-2
3.2.1 Mounting Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-3
3.3 Location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
4 Wiring4.1 Grounding. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.2 Manipulator Cable Connection. . . . . . . . . . . . . . . . . . . . . 4-2
4.2.1 Connection to the Manipulator. . . . . . . . . . . . . . . . . . . . . . . . . .4-2
4.2.2 Connection to the NX100 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-2
5 Basic Specifications
5.1 Basic Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
5.2 Part Names and Working Axes . . . . . . . . . . . . . . . . . . . . 5-2
5.3 Manipulator Base Dimensions . . . . . . . . . . . . . . . . . . . . . 5-2
5.4 Dimensions and P-Point Maximum Envelope . . . . . . 5-3
5.5 Alterable Operating Range . . . . . . . . . . . . . . . . . . . . . . . . 5-4
5.5.1 Components for Altering Operating Range . . . . . . . . . . . . . . . .5-5
5.5.2 Notes on the Mechanical Stopper Installation. . . . . . . . . . . . . .5-6
5.5.3 Adjustment to the Pulse Limitation of S-Axis. . . . . . . . . . . . . . .5-7
Mounting the S-Axis Stopper by Settable Angles . . . . . . . . .5-9
7/71
HW0482143

viii
HW0482143
6 Allowable Load for Wrist Axis and Wrist Flange
6.1 Allowable Wrist Load. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-1
6.2 Wrist Flange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-2
7 System Application
7.1 Peripheral Equipment Mounts . . . . . . . . . . . . . . . . . . . . . .7-1
7.2 Internal User I/O Wiring Harness and Air Lines . . . . .7-2
8 Motoman Construction
8.1 Position of S-Axis Limit Switch . . . . . . . . . . . . . . . . . . . . .8-1
8.2 Internal Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-2
9 Maintenance and Inspection
9.1 Inspection Schedule
(Manipulator in the Home Position: Refer to “Fig.21.”) . . . . . . . . . . 9-1
9.2 Notes on Maintenance Procedures. . . . . . . . . . . . . . . . .9-6
9.2.1 Battery Pack Replacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-6
9.2.2
Grease Replenishment/Exchange for S-Axis Speed Reducer
. . . . . . 9-8
Grease Replenishment
(Refer to " Fig. 24 S-Axis Speed Reducer and Gear Diagram ".)
. . 9-8
Grease Exchange
(Refer to " Fig. 24 S-Axis Speed Reducer and Gear Diagram ".)
. . 9-9
9.2.3 Grease Replenishment/Exchange for L-Axis Speed Reducer 9-10
Grease Replenishment
(Refer to " Fig. 25 L-Axis Speed Reducer Diagram ".) . . . . 9-10
Grease Exchange
(Refer to " Fig. 25 L-Axis Speed Reducer Diagram ".) . . . . 9-11
9.2.4 Grease Replenishment/Exchange for U-Axis Speed Reducer9-12
Grease Replenishment
(Refer to " Fig. 26 U-Axis Speed Reducer Diagram ".). . . . 9-12
Grease Exchange
(Refer to " Fig. 26 U-Axis Speed Reducer Diagram ".). . . . 9-13
Grease Replenishment for R-, B-, T- Gears in the Casing
(Refer to " Fig. 27 U-Arm Diagram ".). . . . . . . . . . . . . . . . . 9-15
Grease Replenishment for R-Axis Speed Reducer
(Refer to " Fig. 27 U-Arm Diagram ".). . . . . . . . . . . . . . . . . 9-15
Grease Replenishment for B-Axis Speed Reducer
(Refer to " Fig. 27 U-Arm Diagram ".). . . . . . . . . . . . . . . . . 9-16
Grease Replenishment for T-Axis Speed Reducer
(Refer to " Fig. 27 U-Arm Diagram ".). . . . . . . . . . . . . . . . . 9-16
8/71
HW0482143

ix
HW0482143
Grease Exchange for R-, B- T-Axis Gears in the Casing
(Refer to " Fig. 27 U-Arm Diagram ".) . . . . . . . . . . . . . . . . .9-17
Grease Exchange for R-Axis Speed Reducer
(Refer to " Fig. 27 U-Arm Diagram ".) . . . . . . . . . . . . . . . . .9-17
Grease Exchange for B-Axis Speed Reducer
(Refer to " Fig. 27 U-Arm Diagram ".) . . . . . . . . . . . . . . . . .9-18
Grease Exchange for T-Axis Speed Reducer
(Refer to " Fig. 27 U-Arm Diagram ".) . . . . . . . . . . . . . . . . .9-19
9.2.5 Grease Replenishment for Balancer Connection Part. . . . . . .9-20
9.2.6 Notes for Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9-22
Battery Pack Connections. . . . . . . . . . . . . . . . . . . . . . . . . .9-22
10 Recommended Spare Parts
11 Parts List
11.1 S-Axis Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-1
11.2 L-Axis Unit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-3
11.3 URBT-Axis Link Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-5
11.4 Wrist Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-7
11.5 Balancer Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11-9
9/71
HW0482143

1.1 Contents Confirmation
1-1
HW0482143
1Product Confirmation
1.1 Contents Confirmation
Confirm the contents of the delivery when the product arrives.
Standard delivery includes the following four items (Information for the content of optional
goods is given separately):
• Manipulator
• NX100
• Programming Pendant
• Manipulator cables (3 cables, between the NX100 and the manipulator)
• Confirm that the manipulator and the NX100 have the same order num-
ber. Special care must be taken when more than one manipulator is to
be installed.
If the numbers do not match, manipulators may not perform as expected and cause injury
or damage.
CAUTION
10/71
HW0482143

1.2 Order Number Confirmation
1-2
HW0482143
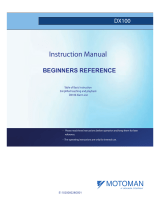
1.2 Order Number Confirmation
Check that the order number of the manipulator corresponds to the NX100. The order number
is located on a label as shown below.
(a) NX100 (Front View) (b) Manipulator (Side View)
Fig. 1 Location of Order Number Labels
Label (Enlarged view)
THE MANIPULATOR AND THE CONTROLLER
SHOULD HAVE SAME ORDER NUMBER.
ORDER. No.
Check that the manipulator
and the NX100 have the
same order number.
NX100
200V 50Hz
kVA
3PHASE220V 50/60Hz
NJ2484-1
MADE IN JAPAN
DATE
SERIAL No.
ERCR-
TYPE
POWER SUPPLY
******
ORDER NO.
NJ1529
THE MANIPULATOR AND THE CONTROLLER
SHOULD HAVE SAME ORDER NUMBER.
WARNING
Do not open the door
RESET
OFF
TRIPPED
ON
N
P
O
E
T
R
G
Y
C
M
S
E
E
SELECT
PLAY
TEACH
REMOTE
SERVO
POWER
S-
X+
S+
MAIN
MENU
R-
x
R+
x
ASSIST
COORD.
MULTI
DISPLAY
SWITCH
X-
yy
645
AUXILIARY
AUXILIARY
TIMER
1
WEAVING
COMPLETE
VOLTAGE CURRENT
2
WELD
COMPLETE
3
RETRUCT
DELETE
BACK
INSERT
NEXT
L+L-
R-
LOCK
INTER
WEAVING
START
7
+
R+
B+B-
z
T-
WELD
START
8
FEED
9
T
EST RUN
SHIFT
z
T+
EX-AXIS
SWITCH
ROBOT
SWITCH
-
SHIFT
Y+Y-
0
ENTER
CABCEK
INTER.
REF.
POINT
MODIFY
.
-
VOLTAGE CURRENT
SHORTCUT
MENU
11/71
HW0482143

2.1 Transporting Method
2-1
HW0482143
2Transporting
2.1 Transporting Method
2.1.1 Using a Crane
As a rule, when removing the manipulator from the package and moving it, a crane should be
used. The manipulator should be lifted using wire rope threaded through shipping bolts and
brackets. Be sure the manipulator is fixed with the shipping bolts and brackets before trans-
porting, and lift it in the posture as shown in " Fig. 2 Transporting Position ".
• Sling and crane or forklift operations must be performed by authorized
personnel only.
Failure to observe this caution may result in injury or damage.
• Avoid excessive vibration or shock during transporting.
The system consists of precision components, so failure to observe this caution may
adversely affect performance.
• The weight of the manipulator is approximately 1620kg including the shipping bolts and
brackets. Use a wire rope strong enough to withstand the weight.
• Shipping bolts and brackets are designed to support the manipulator weight. Do not use
them for anything other than transporting the manipulator.
• Mount the shipping bolts and brackets for transporting the manipulator.
• Avoid exerting force on the arm or motor unit when transporting, use caution when using
transporting equipment other than a crane or forklift, as injury may occur.
CAUTION
NOTE
12/71
HW0482143

2.1 Transporting Method
2-2
HW0482143
Fig. 2 Transporting Position
A
B
Electrical tape
painted yellow
Rubber plate
Details of shipping bolt
Shipping bolt
(1 piece)
Hexagon socket head
cap screw M20
(length: 50mm) (8 screws)
Shipping bracket (2 pieces)
Shipping bracket (2 pieces)
13/71
HW0482143

2.2 Shipping Bolts and Brackets
2-3
HW0482143
2.2 Shipping Bolts and Brackets
The manipulator is provided with shipping bolts and brackets at position A and with the hexa-
gon socket head cap screws at point B. (" Fig. 2 Transporting Position ")
Fig. 3 Shipping Bolts and Brackets
• The shipping brackets are painted yellow.
Position Bolt Type Pcs
AHexagon socket head cap bolt M20 X 50 mm
(Tensile strength: 1200 N/mm2 or more) 8
BHexagon socket head cap bolt M16 X 20 mm
(Tensile strength: 1200 N/mm2 or more) 1
Before turning ON the power, check to be sure that the shipping bolts and brackets have
been removed. The shipping bolts and brackets then must be stored for future use, in the
event that the robot must be moved again.
BShipping bolt Rubber plate
Electrical tape painted yellow
AShipping bracket
Front View Side View
NOTE
14/71
HW0482143

3-1
HW0482143
3Installation
• Install the safeguarding.
Failure to observe this warning may result in injury or damage.
• Install the manipulator in a location where the manipulator’s tool or the
workpiece held by the manipulator will not reach the wall, safeguarding,
or NX100 when the arm is fully extended.
Failure to observe this warning may result in injury or damage.
• Do not start the manipulator or even turn on the power before it is firmly
anchored.
The manipulator may overturn and cause injury or damage.
• Do not install or operate a manipulator that is damaged or lacking parts.
Failure to observe this caution may cause injury or damage.
• Before turning on the power, check to be sure that the shipping bolts
and brackets explained in “ Fig. 3 Shipping Bolts and Brackets ” are
removed.
Failure to observe this caution may result in damage to the driving parts.
WARNING
CAUTION
15/71
HW0482143

3.1 Installation of the Safeguarding
3-2
HW0482143
3.1 Installation of the Safeguarding
To insure safety, be sure to install the safeguarding. They prevent unforeseen accidents with
personnel and damage to equipment. The following is quoted for your information and guid-
ance.
Responsibility for Safeguarding (ISO 10218)
The user of a manipulator or robot system shall ensure that safeguarding is provided and
used in accordance with Sections 6, 7, and 8 of this standard. The means and degree of safe-
guarding, including any redundancies, shall correspond directly to the type and level of hazard
presented by the robot system consistent with the robot application. Safeguarding may
include but not be limited to safeguarding devices, barriers, interlock barriers, perimeter
guarding, awareness barriers, and awareness signals.
3.2 Mounting Procedures for Manipulator Base
The manipulator should be firmly mounted on a baseplate or foundation strong enough to sup-
port the manipulator and withstand repulsion forces during acceleration and deceleration.
Construct a solid foundation with the appropriate thickness to withstand maximum repulsion
forces of the manipulator. Refer to " Table. 1 Maximum Repulsion Forces of the Manipulator "
and " Table. 2 Endurance Torque in Operation ".
During installation, if the flatness is not right, the manipulator shape may change and its func-
tional ability may be compromised. Baseplate flatness must be kept at 0.5mm or less. Mount
the manipulator base as described in “ 3.2.1 Mounting Example “..
Table. 1 Maximum Repulsion Forces of the Manipulator
Horizontal rotating maximum torque
(S-axis moving direction) 32000N • m
(3265kgf • m)
Vertical rotating maximum torque
(LU-axis moving direction) 78500N • m
(8000kgf • m)
Table. 2 Endurance Torque in Operation
Horizontal acceleration and
deceleration maximum torque 9000N • m
(918kgf • m)
Vertical acceleration and decel-
eration maximum torque 26150N • m
(2664kgf • m)
16/71
HW0482143

3.3 Location
3-3
HW0482143
3.2.1 Mounting Example
The baseplate should be rugged and durable to prevent shifting of the manipulator or the fix-
ture. The thickness of the baseplate is 50mm or more and an M20 size or larger anchor bolt is
recommended.
Fix the manipulator base onto the baseplate with the hexagon socket head cap screw M20 (8
screws, length: 80mm or more is recommended) as shown in " Fig. 4 Mounting the Manipula-
tor on Baseplate ". Tighten the hexagon socket head cap screws and anchor bolts securely
so that they will not work loose during operation.
Fig. 4 Mounting the Manipulator on Baseplate
3.3 Location
When the manipulator is installed, it is necessary to satisfy the undermentioned environmental
conditions:
• Ambient temperature: 0° to 45°C
• Humidity: 20 to 80%RH at constant temperature
• Free from exposure to water, oil, or dust
• Free from corrosive gas or liquid, or explosive gas or liquid
• Free from excessive vibration (less than 4.9m/s2 [0.5G])
• Free from large electrical noise (plasma)
• Flatness for installation is 0.5mm or less
40mm
Baseplate
Manipulator base
Flat washer
Spring washer
M20 (8 screws)
Flatness:0.5mm or less
Hexagon socket head cap screw
17/71
HW0482143

4.1 Grounding
4-1
HW0482143
4Wiring
4.1 Grounding
Follow local regulations for grounding line size. A line of 5.5mm2 or more is recommended.
Refer to " Fig. 5 Grounding Method " to connect the ground line directly to the manipulator.
• Ground resistance must be 100 Ω or less.
Failure to observe this warning may result in fire or electric shock.
• Before wiring, make sure to turn the primary power supply off, and put
up a warning sign. (ex. DO NOT TURN THE POWER ON.)
Failure to observe this warning may result in fire or electric shock.
• Wiring must be performed by authorized or certified personnel.
Failure to observe this caution may result in fire or electric shock.
• Do not cover the cable or allow it to tangle. Keep the cable as straight
as possible.
Failure to observe this caution may result in preventing heat of the cable from being dis-
charged.
• Do not use this line in common with other ground lines or grounding electrodes for other
electric power, motor power, welding devices, etc.
• Where metal ducts, metallic conduits, or distributing racks are used for cable laying,
ground in accordance with Electric Equipment Technical Standards.
WARNING
CAUTION
NOTE
18/71
HW0482143

4.2 Manipulator Cable Connection
4-2
HW0482143
Fig. 5 Grounding Method
4.2 Manipulator Cable Connection
Three manipulator cables are delivered with the manipulator: an encoder cable for detection
(1BC) and two power cables (2BC and 3BC). Refer to " Fig. 6 Manipulator Cable Connections
". The cables are connected to manipulator base connectors and NX100.
4.2.1 Connection to the Manipulator
The manipulator cables and manipulator base connectors are numbered 1BC, 2BC, and 3BC.
Verify the numbers and connect these cables to the manipulator base connectors in the order
of 2BC first, 3BC second, and 1BC last. Refer to “ Fig. 7 (a) Details of the Manipulator Cable
Connectors (Manipulator Side) “. When connecting the cables, insert them adjusting cable
connector positions to main key positions of the manipulator, and set the lever until it clicks.
4.2.2 Connection to the NX100
The manipulator cables and NX100 board connectors are numbered 1BC, 2BC, and 3BC.
Verify the numbers and connect these cables to the NX100 board connectors in the order of
2BC first, 3BC second, and 1BC last. Refer to " Fig. 7 (b)) Manipulator Cable Connections to
the NX100 ". When connecting the cables, insert them adjusting cable connector positions to
main key positions of the NX100, and set the lever until it clicks.
A
5.5mm2or more View A
Bolt M8 (for grounding)
Delivered with the manipulator
19/71
HW0482143

4.2 Manipulator Cable Connection
4-3
HW0482143
Fig. 6) Manipulator Cable Connections
X11
1BC
X21
2BC
X22
3BC
3BC
Power cable
X11 1BC
X21 2BC
X22 3BC
Power cable
2BC
Encoder cable
1BC
Manipulator side
NX100 side
Manipulator side
Manipulator side
NX100 side
NX100 side
20/71
HW0482143
/