Rockwell Automation Allen-Bradley 2198-P031 Application Technique
- Category
- Electrical relays
- Type
- Application Technique

Application Technique
Original Instructions
Drives in Common Bus Configurations
with Kinetix 5700 Bus Supplies
Catalog Numbers 2198-P031, 2198-P070, 2198-P141, 2198-P208, 2198-RP088, 2198-RP200, 2198-RP263, 2198-RP312

2 Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020
Drives in Common Bus Configurations with Kinetix 5700 Bus Supplies Application Technique
Important User Information
Read this document and the documents listed in the additional resources section about installation, configuration, and
operation of this equipment before you install, configure, operate, or maintain this product. Users are required to familiarize
themselves with installation and wiring instructions in addition to requirements of all applicable codes, laws, and standards.
Activities including installation, adjustments, putting into service, use, assembly, disassembly, and maintenance are required to
be carried out by suitably trained personnel in accordance with applicable code of practice.
If this equipment is used in a manner not specified by the manufacturer, the protection provided by the equipment may be
impaired.
In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the use
or application of this equipment.
The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and
requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or liability for
actual use based on the examples and diagrams.
No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or software
described in this manual.
Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation, Inc., is
prohibited.
Throughout this manual, when necessary, we use notes to make you aware of safety considerations.
Labels may also be on or inside the equipment to provide specific precautions.
WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardous environment, which may
lead to personal injury or death, property damage, or economic loss.
ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death, property damage, or
economic loss. Attentions help you identify a hazard, avoid a hazard, and recognize the consequence.
IMPORTANT
Identifies information that is critical for successful application and understanding of the product.
SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that dangerous voltage may
be present.
BURN HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people that surfaces may reach
dangerous temperatures.
ARC FLASH HAZARD: Labels may be on or inside the equipment, for example, a motor control center, to alert people to potential Arc
Flash. Arc Flash will cause severe injury or death. Wear proper Personal Protective Equipment (PPE). Follow ALL Regulatory requirements
for safe work practices and for Personal Protective Equipment (PPE).

Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020 3
Table of Contents
Preface
Download Firmware, AOP, EDS, and Other Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Chapter 1
DC-bus Wiring Guidelines Drive Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
DC-bus Connections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Precharge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Chapter 2
Non-regenerative Common
DC-bus Configurations
Supported Products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Typical System Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
General Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
AC Line Impedance Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Disconnect Switch Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Input and Output Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Drive Ground Jumper Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Kinetix 5700 Non-Regenerative Bus Supply Considerations. . . . . . . . . . . . . . . . . . . . . . 22
Power Supply Ground Screw Setting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Contactor Enable Relay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
System Sizing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Capacitance Sizing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Circuit Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Chapter 3
Non-regenerative Common
DC-bus Configurations
With Passive or Active Shunt
Supported Products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Typical System Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
General Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
AC Line Impedance Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Disconnect Switch Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Input and Output Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Drive Ground Jumper Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Active Shunt Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Kinetix 5700 Non-Regenerative Bus Supply Considerations. . . . . . . . . . . . . . . . . . . . . . 32
Shunt Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Power Supply Ground Screw Setting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Contactor Enable Relay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
System Sizing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Capacitance Sizing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Circuit Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Chapter 4
Regenerative Bus Supply
Configurations
Supported Products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Typical System Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
General Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38

4 Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020
Table of Contents
AC Line Impedance Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Disconnect Switch Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Input and Output Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Drive Ground Jumper Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Kinetix 5700 Regenerative Bus Supply Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Bus Supply Ground Jumper Setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Converter OK Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Contactor Enable Relay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
System Sizing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Capacitance Sizing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Circuit Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Chapter 5
Regenerative Bus Supply
Configurations With Active
Shunt
Supported Products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Typical System Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
General Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Active Shunt Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Kinetix 5700 Regenerative Bus Supply Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . 53
System Sizing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Circuit Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Appendix A
Kinetix and PowerFlex Drive
Specifications
Kinetix 5700 Drive Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Kinetix 6000 Drive Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Kinetix 6200 and Kinetix 6500 Drive Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Kinetix 7000 Drive Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
PowerFlex 750-Series Drive Specifications. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Fuse Certification and Test Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
JKS Fuses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
170M Fuses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Appendix B
Kinetix 5700 Accessory Modules Accessory Flow Chart. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Capacitor Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
DC-Bus Conditioner Module. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Extension Module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Additional Resources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81

Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020 5
Preface
An increasing number of drive systems, in a wide range of applications and power ranges, are being configured today in common bus
configurations. These system configurations provide significant advantages, such as design flexibility, high efficiency, and cost savings.
It is the objective of this publication to provide the necessary guidelines, considerations, and limitations for the proper application of
Kinetix® and PowerFlex® drives that are used in common-bus configurations with Kinetix 5700 bus supplies.
Download Firmware, AOP, EDS, and Other Files
Download firmware, associated files (such as AOP, EDS, and DTM), and access product release notes from the Product Compatibility and
Download Center at rok.auto/pcdc
.

6 Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020
Preface
Notes:

Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020 7
Chapter 1
DC-bus Wiring Guidelines
This chapter provides guidelines for wiring DC common-bus drive systems. Common-bus configurations can be regenerative or non-
regenerative. Other variations include active and passive shunt resistors.
Drive Systems
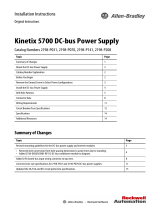
Generally, it is desirable to have the Kinetix 5700 drive mounting order match the machine layout. However, if a mix of drive frame sizes is
used in the system, we recommend that the inverter modules are mounted according to power rating (highest to lowest) from left to right (or
right to left) starting with the highest power rating. The DC-bus power supply or regenerative bus supply can be mounted anywhere within
the cluster.
It is often advantageous to place the Kinetix 5700 bus supply in the middle of the line-up to minimize the distance to the farthest loads.
Shorter distances can minimize the energy that is stored in the parasitic inductance of the bus structure, which helps to lower peak-bus
voltages and mitigate voltage transients during operation. The Extended DC-bus Installation Example
on page 8, illustrates a Kinetix 5700
drive system with a PowerFlex® 750-Series drive, Kinetix 7000 drive, and Kinetix 6000 drive system all powered by the 2198-RPxxx
regenerative bus supply.
Common Bus Configuration Definition
Non-regenerative (diode-front-end)
The non-regenerative common DC-bus topology uses a pulse-width modulated (PWM) controlled insulated-gate bipolar
transistor (IGBT) converter that provides single-direction power flow from the incoming AC line. The full-wave bridge
rectifier converts three-phase AC voltage to a fixed DC-bus voltage. This configuration contains one or more inverter
drives connected directly to the DC common bus.
Non-regenerative with passive or active shunt Same as non-regenerative, but with an added shunt module to dissipate excess regenerative DC-bus energy to a resistor.
Regenerative (active-front-end)
The regenerative bus supply, active front end (AFE) topology, uses a pulse-width modulated (PWM) controlled insulated-
gate bipolar transistor (IGBT) converter that enables bidirectional power flow from and back to the incoming AC line. The
full-wave bridge rectifier converts three-phase AC voltage to a fixed DC-bus voltage. When the DC-bus voltage is
increased above a threshold, a portion of the DC-bus voltage is converted back to three-phase AC voltage. This
configuration contains one or more inverter drives connected directly to the DC common bus.
Regenerative with active shunt
Same as regenerative, but with an added shunt module. In this configuration, some regenerative DC-bus energy flows to
the incoming AC line, and the excess DC-bus energy (that is not regenerated) is dissipated to an external active shunt
module. See Kinetix® 5700 Servo Drives User Manual, publication 2198-UM002
, for specific active shunt
recommendations to be used with the 2198-RPxxx regenerative bus supply.

8 Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020
Chapter 1 DC-bus Wiring Guidelines
Figure 1 - Extended DC-bus Installation Example
DC-bus Connections
DC-bus cables and bus bars are used to connect drives in common-bus configurations.
DC-bus Cable
When using cables to connect drives to the system bus, observe the following guidelines:
• Use only unshielded cable for DC-bus voltage.
• Use 1000V rated insulation cable in this application.
• Make the DC+ and DC– cable distance as short as possible to help reduce cable inductance.
• Twisting the DC-bus cable together is not required, however, it is recommended to make sure the DC cables are routed close to each
other.
• The maximum DC-bus cable length (power supply cluster to extended cluster) is 70 m (230 ft).
• No single external DC-bus connection from the power supply cluster can exceed 70 m (230 ft). You can extend the DC-bus from the
right and left of the power supply cluster, but the total DC-bus length (including DC-bus cabling and DC bus-bar) from the power supply
cluster to all extended clusters cannot exceed 140 m (459 ft).
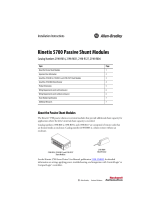
• The Bus Voltage Reference Source is configurable. When it is set to Automatic, the converter optimizes the Bus Voltage Reference for
the best converter setting. When it is set to Manual, you configure the desired Bus Voltage Set Point value for the Bus Voltage
Reference signal.
• To prevent nuisance bus-overvoltage faults, the maximum Bus Voltage Set Point of the regenerative bus supply reduces linearly from
750V DC to 715V DC as the DC-bus cable length per cluster increases from 0 to 70 m (230 ft) respectively.
IMPORTANT The interconnection of drives to the DC-bus, and the inductance levels between the drives, must be kept to a minimum for
optimum system operation.
MOD
NET
MOD
NET
MOD
NET
2
1
2
1
2
1
UFB
UFB-A UFB-B
UFB-A UFB-B
D+
D-
D+
D-
D+
D-
MF-A MF-B MF-A MF-B
D+
D-
MBRK
+
-
MOD
NET
D+
D-
MF
MODULE
STATUS
1
I/O-A
6
510
1
I/O-B
6
510
1
I/O
6
5
10
1
I/O-A
6
510
1
I/O-B
6
510
MOD
NET
2
1
1
I/O
6
5
10
OK+
OK–
EN–
EN+
MOD
DC BUS
Single-axis
Inverter
Dual-axis
Inverters
Bulletin 1321
Line Reactor
AC Line Filter
Circuit
Protection
Magnetic (M1)
Contactor
Line
Disconnect
Device
DC-bus Circuit
Protection
DC-bus Circuit
Protection
2094-BMxx-S
Axis Modules (5)
PowerFlex
750-Series AC Drive
2094-BMxx-Mxx-S
IAM Module
Common Bus Follower
2094-PRSx
Power Rail
DC-bus
Extension
Bonded Cabinet
Ground Bus
Kinetix 7000
Servo Drive
Bulletin 1492 Power Distribution
Terminal Block
Kinetix 6000 Servo Drive System
Kinetix 5700
Servo Drive System
Regenerative
Bus Supply
2198-CAPMOD-2240
Capacitor Module
2198-DCBUSCOND-RP312
DC-bus Conditioner Module
2099-BMxx-S
Servo Drive
DC-bus Circuit
Protection
Accessory
Modules

Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020 9
DC-bus Wiring Guidelines Chapter 1
Figure 2 - DC-bus Cable Length per Cluster
Low-inductance DC cable routing can be achieved by means of positive and negative cables routed in parallel and as close to one another as
possible, less than 0.3 m (1.0 ft). Low-inductance DC-bus connection, a feature of the Kinetix 5700 drive system, is also achieved by using
2198-BARCON-xxxx200 DC-bus link connector kits that are included in each Kinetix 5700 inverter.
Size the DC cable in accordance with UL or applicable agency guidelines. Because voltage drop is directly proportional to cable resistance,
you can further reduce the voltage drop across the DC cable by using a larger AWG cable size.
IMPORTANT Use low-inductance DC cable routing to help reduce the risk of voltage oscillations between clusters.
Table 1 - Recommended DC-bus Cable Gauge
Regenerative Bus Supply
Cat. No.
Recommended DC-bus Cable Gauge
mm
2
(AWG/MCM)
2198-RP088
53.5 (1/0)
2198-RP200
2198-RP263
152 (300 MCM)
2198-RP312
DC-bus Power Supply
Cat. No.
Recommended DC-bus Cable Gauge
mm
2
(AWG/MCM)
2198-P031
53.5 (1/0)
2198-P070
2198-P141
2198-P208
2198-P208 x 2
152 (300 MCM)
2198-P208 x 3
750
745
740
735
730
725
720
715
0
20
40
3010
60
50
70
0
65.6
131
98.432.8
197
164
230
Maximum Bus Voltage Set Point
(Volts DC)
DC-bus Cable Length per Cluster (ft)
DC-bus Cable Length per Cluster (m)

10 Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020
Chapter 1 DC-bus Wiring Guidelines
Wire the External DC-bus Connections
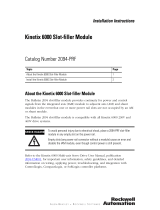
The 2198-CAPMOD-2240 capacitor module and 2198-CAPMOD-DCBUS-IO extension module are used to extend the DC-bus voltage to external
inverter drives. They also provide energy storage. The capacitor module is used alone when the external DC-bus current is ≤104 A. The
capacitor module, combined with a DC-bus module or an extension module, is required when the external DC-bus current is >104 A, up to a
maximum 208 A. Figure 3
is an example of a system requiring >104 A of external DC-bus current. For more information on the use of
accessory modules, see Kinetix 5700 Accessory Modules
on page 71.
Figure 3 - Kinetix 5700 External DC-bus Connection Wiring Example
DC Bus Bar
When using DC bus-bar to connect drives to the system bus, observe the following guidelines:
• DC-bus fuses are required between the Kinetix 5700 power supply cluster and the common DC bus-bar. DC-bus fuses are also
required between the DC bus-bar and the DC input of any external inverter drives. See Kinetix and PowerFlex Drive Specifications
on
page 59 for the recommended common DC-bus circuit protection devices.
• No single external DC-bus connection from the power supply cluster can exceed 70 m (230 ft). You can extend the DC-bus from the
right and left of the power supply cluster, but the total DC-bus length (including DC-bus cabling and DC bus-bar) from the power supply
cluster to all extended clusters cannot exceed 140 m (459 ft).
24V_COM
+24V
2
1
DC+
DC-
24V_COM
+24V
DC+
DC-
24V_COM
+24V
DC+
DC-
DC+
DC-
MS
MS
2
1
Kinetix 5700
2198-Pxxx
DC-bus Power Supply
Bonded Cabinet Ground Bus (user-supplied component)
2198-CAPMOD-DCBUS-IO
Extension Module
Kinetix 5700
2198-Sxxx -ERSx or
2198-Dxxx -ERSx
Inverter
2198-CAPMOD-2240
Capacitor Module
Control Power
(CP) Connectors
DC-bus
(DC) Connectors
PE Ground
Flexible Bus-bars
User-supplied External DC-bus
Wire Lug Connections
Module Status
(MS) Connector
Monitor capacitor module status by wiring to
digital input Bus Capacitor OK on the DC-bus
power supply or to a Logix 5000™ controller.
PE Ground
PE GroundPE Ground
To External
Inverter Drives or
Active Shunt Modules

Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020 11
DC-bus Wiring Guidelines Chapter 1
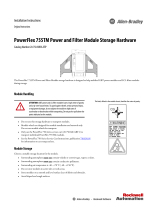
Figure 4 - DC Bus-bar Application
Precharge
Precharge is the process of gradually increasing the DC-bus voltage. During this increase in DC-bus voltage, the DC-bus filter capacitors are
charged in a controlled manner. The precharge assembly can be part of the drive design or for some drives it can be externally provided and
controlled.
If an external voltage source is used to power the logic boards of the PowerFlex drives, take precautions to control the precharge sequence.
We recommend that you use the Precharge Enable digital input on the drive for common bus operation. The logic input can be coordinated
through a PLC or system-level control to sequence the precharge. The sequencing lets charge time constants for various horsepower drives
settle out before the precharge completes. Generally, a three second delay is acceptable after power has been applied. See Drives in
Common Bus Configurations Application Technique, publication DRIVES-AT002
, for precharge functionality on all Powerflex drive frame
types.
ATTENTION: An external source of power can be present. To avoid an electric shock hazard, verify that the AC power supply has been
removed before any maintenance is performed.
MOD
NET
MODULE
STATUS
MOD
NET
2
1
1
I/O
6
5
10
OK+
OK–
EN–
EN+
MOD
NET
2
1
UFB-A UFB-B
D+
D-
MF-A MF-B
D+
D-
MODULE
STATUS
MOD
DC BUS
1
I/O-A
6
510
1
I/O-B
6
510
MOD
NET
UFB-A UFB-B
D+
D-
MF-A MF-B
D+
D-
I/O-A
6
10
1
I/O-B
6
510
MOD
NET
2
1
UFB-A UFB-B
D+
D-
MF-A MF-B
D+
D-
1
I/O-A
6
510
1
I/O-B
6
510
MOD
NET
UFB-A UFB-B
D+
D-
MF-A MF-B
D+
D-
I/O-A
6
10
1
I/O-B
6
510
MODULE
STATUS
MOD
DC BUS
MOD
DC BUS
2198-CAPMOD-2240
Capacitor Module
DC-bus Circuit
Protection
DC-bus
Extension
DC-bus Bar
Kinetix 5700
Servo Drive System
(power supply cluster #1)
Regenerative Bus Supply
2094-BMxx-S
Axis Modules (5)
2094-BMxx-Mxx-S
IAM Module
Common Bus Follower
2094-PRSx
Power Rail
Kinetix 6000 Servo Drive System
DC-bus Circuit
Protection
Kinetix 5700
Servo Drive System
(cluster #2)
Dual-axis Inverters
2198-CAPMOD-2240
Capacitor Module
2198-DCBUSCOND-RP312
DC-bus Conditioner Module
2198-DCBUSCOND-RP312
DC-bus Conditioner Module
Accessory
Modules
Accessory
Modules

12 Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020
Chapter 1 DC-bus Wiring Guidelines
When multiple drives are connected through disconnects to a common DC-bus, it is necessary to provide an input to the drive that enables
the precharge to finish. Often, an auxiliary contact on the drive disconnect switch controls this input.
Figure 5 - Common DC-bus Example
If Precharge Enable is selected as a digital input, it must be energized to let the initial bus precharge complete. If Precharge Enable is de-
energized, it is treated as a coast-to-stop command that forces the drive to the initial bus-precharge state. Fuse failure is probable unless
coordination of precharge circuits in individual drives is implemented.
When Kinetix 6000 drives are used in common bus configurations, they must have firmware revision 1.92 or later. Kinetix 6200/6500 drives
with any firmware revision can be used.
PowerFlex 750-Series (Frame 1…4) AC Drives
For PowerFlex 750-Series frame 1…4 AC drives, the precharge hardware is on the power circuit board. It is composed of a resistor in series
with the positive DC-bus, between the DC link and the bus capacitors. The resistor has a relay contact that is connected in parallel, which
closes to bypass the Precharge resistor when the bus precharge level is attained. The precharge function operates the same way for either
AC or DC input power.
Figure 6 - AC and DC Input Schematic for PowerFlex 750-Series (Frame 1…4) AC Drives
ATTENTION: The Precharge Enable digital input is only available on PowerFlex 750-Series common-bus inverter drives. The Kinetix
servo drives do not include a Precharge Enable digital input.
ATTENTION: The bus capacitors in the individual drives act as a low-impedance voltage source. Extra care is needed when connecting
individual drives to an energized bus.
ATTENTION: Kinetix drives have no method for you to control the precharge sequence. To avoid severe drive and/or equipment
damage due to uncontrolled precharge, do not connect Kinetix servo drives to an energized DC-bus.
M1
M2
L1
L2
L3
DC+
DC–
DC –
BR2
L1
L2
L3
U
V
W
DC+
BR1
+

Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020 13
DC-bus Wiring Guidelines Chapter 1
PowerFlex 750-Series (Frame 5 and 6) AC Drives
When ordered as an AC input drive, DC terminals are not provided on Frame 6 drives. During precharge, the SCRs of the front-end rectifier
are open and the bus capacitors are charged through the diodes and resistors from the AC input. After the DC-bus has reached precharge
level, the SCRs (when turned on) bypass the diode resistor configuration.
Figure 7 - AC and DC Input Schematic for PowerFlex 750-Series (Frame 5 and 6) AC Drives
PowerFlex 750-Series (Frame 5 and 6) DC Input Common-bus Drives
The precharge has a resistor in series with the positive DC-bus, ahead of the bus capacitors. An SCR is connected in parallel and when gated
on, it bypasses the resistor.
Figure 8 - DC Input Schematic for PowerFlex 750-Series (Frame 5 and 6) DC Input Drives
ATTENTION: PowerFlex 750-Series (Frames 5 and 6) AC input drives have no method for you to control the precharge sequence. To
avoid severe drive and/or equipment damage due to uncontrolled precharge, do not connect these drives to an energized DC-bus.
DC –
BR2
L1
L2
L3
U
V
W
DC+
BR1
+
Optional for PowerFlex Frame 6 Drives
Voltage Rating
Catalog Codes 1 and A
+
DC –
1RB+ CD
BR2
U
V
W
Optional for PowerFlex Frame 6 Drives
Input Type Catalog Number
Position 5, Code 4

14 Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020
Chapter 1 DC-bus Wiring Guidelines
Kinetix 7000 Servo Drives
For 2099-BM06-S, 2099-BM07-S, and 2099-BM08-S servo drives, the precharge hardware is located on the power circuit board. It is
composed of a resistor in series with the positive DC-bus between the DC link and the bus capacitors. The resistor has a relay contact
connected in parallel that closes when the bus precharge level has been reached, bypassing the precharge resistor. The precharge function
operates the same way for AC and DC power.
Figure 9 - AC and DC Input Schematic for Kinetix 7000 (2099-BM06-S…2099-BM08-S) Servo Drives
For 2099-BM09-S, 2099-BM10-S, 2099-BM11-S, and 2099-BM12-S servo drives, the precharge capability must be provided at the system level.
Disconnect switches must not be used between the input of the drive and a common DC-bus without the use of an external precharge
device. The precharge hardware is implemented with an SCR rectifier such that the SCRs are phase advanced to limit the inrush current into
the bus capacitors. This phase-advanced precharge is not controlled by the drive and must normally be completed by the minimum
precharge time required by the drive. The drive does not complete precharge until the bus voltage is stable and above the undervoltage level.
Figure 10 - AC Input Schematic for Kinetix 7000 (2099-BM09-S…2099-BM12-S) Servo Drives
+
DC –
DC+
L1
L2
L3
U
V
W
+
DC –
DC +
L1
L2
L3
U
V
W

Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020 15
DC-bus Wiring Guidelines Chapter 1
Kinetix 6000 and Kinetix 6200/6500 Multi-axis Servo Drives
The Kinetix 6000 (400V-class) and Kinetix 6200/6500 drives are packaged, highly configurable, common bus products with one converter
module (IAM) and multiple inverter modules (AM) mounted on a shared backplane. Precharge hardware, which consists of a resistor in series
with a DC link inductor and the positive rail of the DC-bus, is mounted in the converter module. In all recommended common bus
configurations, the converter is not used; therefore, any non-Kinetix 6000 common-bus leader module that does not provide precharge is
required to add an additional external precharge circuit before connecting to any Kinetix 6000 common-bus follower IAM module.
An internal shunt resister (braking chopper) is included with each inverter module. To be used in a common bus system with Kinetix 5700
drives, the Kinetix 6000 system must be set to common-bus follower mode with the internal shunt modules disabled.
Figure 11 - AC and DC Input Schematic for Kinetix 6000 and Kinetix 6200/6500 Servo Drives
IMPORTANT Do not connect three-phase AC power to the Kinetix 6000 (follower) converter in mixed Kinetix 5700 common-bus configurations.
+
DC –
DC+
L1
L2
L3
U
V
W
U
V
W
2094-BCxx-BMxx-S
or
2094-BCxx-BMxx-M
2094-BMxx-S
or
2094-BMxx-M
(up to 7 additional axes)

16 Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020
Chapter 1 DC-bus Wiring Guidelines
Notes:

Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020 17
Chapter 2
Non-regenerative Common DC-bus Configurations
Non-regenerative bus supplies are characterized by a diode-front-end unit that converts three-phase AC line voltage into a non-filtered
DC-bus voltage. No provisions exist for line regeneration or power dissipation of any recovered energy from the motor/load system.
Supported Products
At the time of publication, the following Kinetix® 5700 non-regenerative DC-bus supplies and drives are supported.
Table 2 - Kinetix 5700 Non-regenerative Drive Modules
DC-bus Power Supply
Cat. No.
Supported Drives
• 2198-P031
• 2198-P070
• 2198-P141
• 2198-P208
PowerFlex® 750-Series: Frames 1…6
(1)
(1) PowerFlex 750-Series (Frames 5 and 6) DC input drives with precharge must be selected.
Kinetix 7000: All power ratings
Kinetix 6000: All 460V configurations
(2)
(2) Kinetix 6000 configurations require firmware revision 1.92 or later.
Kinetix 6200/6500: All configurations

18 Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020
Chapter 2 Non-regenerative Common DC-bus Configurations
Typical System Configuration
In this example, standalone AC drives, Kinetix 6000 drives, and Kinetix 7000 drives receive DC-bus power from three 2198-P208 DC-bus
power supplies.
Figure 12 - DC-bus Supply with Standalone AC Drives, Kinetix 6x00 Drives, and Kinetix 7000 Drives
(1) Line reactors are required when three 2198-P208 DC-bus supplies are configured. For line reactor considerations and selection when one or two 2198-P208 DC-bus supplies are configured,
see the Kinetix 5700 Servo Drives User Manual, publication 2198-UM002
.
Table 3 - Special Bus Requirements
Drawing Designation Supported Drives Special Bus Requirements
AC drives
PowerFlex 750-Series: Frames 1…6
NoneKinetix 7000: 2099-BM06-S…2099-BM08-S
Kinetix 7000: 2099-BM09-S…2099-BM12-S
Kinetix 6000 and
Kinetix 6200/6500 drives
Kinetix 6000: All 460V configurations
(1)
(1) No internal precharge. Drives must be placed in common-bus follower configuration.
None
Kinetix 6200/6500: All 460V configurations
(1)
2198-P208
2198-CAPMOD-2240
2198-CAPMOD-DCBUS-IO
2198-P208
2198-P208
Three-phase
Source
DC+
DC-
M
DC+
DC-
M
AC Drive AC Drive
M
M
M
Kinetix 6000 or
Kinetix 6200/6500 Drives
DC+ DC-
Contactor
Three-phase
Capacitor
Module
DC-Bus
Power Supply
Extension
Module
DC Bus
DC-Bus
Power Supply
DC-Bus
Power Supply
Reactor
Line
Reactor
Line
Reactor
Line
AC Line Filter
Three-phase
Circuit
Protection
Circuit
Protection
Circuit
Protection
M
Circuit
Protection
Integrated
Axis Module
Axis
Modules
(1)
(1)
(1)

Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020 19
Non-regenerative Common DC-bus Configurations Chapter 2
General Considerations
This section includes information on AC line impedance, disconnect switch connections, and ground screw/jumper settings, depending on
the drive family.
• All system components (bus supply and PowerFlex or Kinetix drives) must be selected for the same AC-line voltage.
• Low-inductance type DC-bus must be used. See DC-bus Connections
on page 8 for details.
• To be used in a common-bus system with a Kinetix 5700 bus supply, the Kinetix 6000 or Kinetix 6200/6500 drive systems must be
configured as common-bus follower (internal IGBT for shunting is disabled).
•Refer to Additional Resources
on page 81 for user documentation with the maximum motor cable length requirements of the drives
specific to your application.
AC Line Impedance Considerations
In the following use cases, an additional transformer or line reactor is required due to faults or potential damage associated with AC line
disturbances:
• Installation site has switched power-factor correction capacitors.
• Installation site has lightning strikes or voltage spikes in excess of 6000V peak.
• Installation site has power interruptions or voltage dips in excess of 200V AC.
• The transformer kVA is more than 10 times larger than the drive kVA or the percent source impedance relative to each converter is
less than 0.5%.
In the following use cases, a line reactor is required due to faults associated with sharing AC line-input on multiple converters:
• Repetitive AC input line-voltage notching is present. For example, if silicon-controlled rectifier drive is connected to the same AC
input power source.
•Powering 2198-Pxxx DC-bus power supply and 2198-RPxxx regenerative bus supply from the same AC input-power source.
- Line reactor in the AC input-power string is not required for the DC-bus power supply in this use case, but is recommended for the
prevention of issues caused by other use cases.
• Powering two or three 2198-P208 DC-bus power supplies from the same AC input-power source that share the same DC-bus.
- In this use case, a line reactor is required for each 2198-P208 DC-bus power supply to make sure that they share current more
evenly.
Refer to Kinetix 5700 Servo Drives User Manual, publication 2198-UM002
, for additional AC line impedance considerations.
ATTENTION: The incorrect use or configuration of third-party assemblies can result in reduced system reliability and drive damage.
IMPORTANT Do not include the 2094-BSP2 shunt module on the 2094 power rail.

20 Rockwell Automation Publication MOTION-AT007A-EN-P - May 2020
Chapter 2 Non-regenerative Common DC-bus Configurations
Disconnect Switch Considerations
If a disconnect switch is used between the common DC-bus and a PowerFlex 750-Series drive input, connect an auxiliary contact on the
disconnect switch to a digital input of the drive. The corresponding digital input must be set to Precharge Enable. This setting provides the
proper precharge interlocking, which guards against possible damage to the drive when reconnecting the drive to an energized DC-bus.
Under this condition, the drives must have an internal or externally supplied precharge. Precharge handshaking is required before inverter
operation. For more information on precharge handshaking, see Drives in Common Bus Configurations Application Technique, publication
DRIVES-AT002
.
When an external precharge device is required, a fuse combination switch can be used. These switches provide precharge of capacitive
loads, have integrated fuse protection, and perform automatic pre-load type functions with an internal coil.
Input and Output Signals
For the Kinetix 7000 drives, wire the control and interface signals on the General Purpose Relay (GPR) connector as described in the following
table. See the Kinetix 7000 High Power Servo Drives User Manual, publication 2099-UM001
, for more information on the terminal block
connections.
Table 4 - PowerFlex 750-Series Drive Precharge Parameters
Parameter
Digital Input
Number Setting
189 [DI Precharge] See PowerFlex 750-Series AC Drives Programming Manual, publication 750-PM001
ATTENTION: To avoid personal injury and/or equipment damage, make sure installation complies with specifications regarding wire
types, conductor sizes, branch circuit protection, and disconnect devices. The National Electrical Code (NEC) and local codes outline
provisions for safely installing electrical equipment.
ATTENTION: The Kinetix 6000 (400V-class), Kinetix 6200/6500, Kinetix 7000, and PowerFlex 750-Series (Frames 5 and 6) AC input
drives have no method for you to control the precharge sequence. To avoid sever drive and/or equipment damage due to uncontrolled
precharge, do not connect these drives to an energized bus. If a disconnect switch is used between the inputs of the drives and the
common DC-bus, an external precharge device must be used.
Table 5 - General Purpose Relay Connections
Signal Terminal Description
Recommended Wire Size
mm
2
(AWG)
Strip Length
mm (in.)
Torque Value
N•m (lb•in)
DRIVE OK+ 5 Programmable N.O. Relay 2 output 0.75 (18)
(stranded wire with ferrule)
1.5 (16)
(solid wire)
7.0 (0.275) 0.235 (2.0)
DRIVE OK- 6 Programmable Relay 2 common
ATTENTION: For Kinetix 7000 drives, wiring the DRIVE OK signal on the General Purpose Relay is required. To avoid injury or damage to
the drive, wire the DRIVE OK relay into your control string.
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82


















































































Rockwell Automation Allen-Bradley 2198-P031 Application Technique
- Category
- Electrical relays
- Type
- Application Technique
Ask a question and I''ll find the answer in the document
Finding information in a document is now easier with AI
Related papers
-
 Rockwell Automation Allen-Bradley Kinetix 5700 Series Reference guide
Rockwell Automation Allen-Bradley Kinetix 5700 Series Reference guide
-
 Rockwell Automation Allen-Bradley Kinetix 5700 Series Installation Instructions Manual
Rockwell Automation Allen-Bradley Kinetix 5700 Series Installation Instructions Manual
-
 Rockwell Automation Allen-Bradley Kinetix 2198-R014 Installation Instructions Manual
Rockwell Automation Allen-Bradley Kinetix 2198-R014 Installation Instructions Manual
-
 Rockwell Automation Allen-Bradley Kinetix 5700 Series Installation Instructions Manual
Rockwell Automation Allen-Bradley Kinetix 5700 Series Installation Instructions Manual
-
 Rockwell Automation Allen-Bradley Kinetix 5500 Migration Manual
Rockwell Automation Allen-Bradley Kinetix 5500 Migration Manual
-
 Rockwell Automation Allen-Bradley 2198-R127 Installation Instructions Manual
Rockwell Automation Allen-Bradley 2198-R127 Installation Instructions Manual
-
 Rockwell Automation Allen-Bradley Kinetix 5700 Series Installation guide
Rockwell Automation Allen-Bradley Kinetix 5700 Series Installation guide
-
 Rockwell Automation Kinetix 6000 Installation guide
Rockwell Automation Kinetix 6000 Installation guide
-
 Rockwell Automation PowerFlex 755TM Installation guide
Rockwell Automation PowerFlex 755TM Installation guide
-
 Rockwell Automation Allen-Bradley Kinetix 6000 User manual
Rockwell Automation Allen-Bradley Kinetix 6000 User manual










Other documents
-
Rockwell PowerFlex 70 User manual
-
Robertshaw 300-204 Technical Application Guide
-
 Allen Bradley Allen-Bradley 2198-P031 Kinetix 5700 DC-Bus Power Supply User manual
Allen Bradley Allen-Bradley 2198-P031 Kinetix 5700 DC-Bus Power Supply User manual
-
Allen-Bradley Kinetix 5700 User manual
-
Allen-Bradley 2198-RP263 Installation Instructions Manual
-
-
-
-
 Allen Bradley Allen-Bradley 2198-P031 Kinetix 5700 DC-Bus Power Supply User manual
Allen Bradley Allen-Bradley 2198-P031 Kinetix 5700 DC-Bus Power Supply User manual
-

