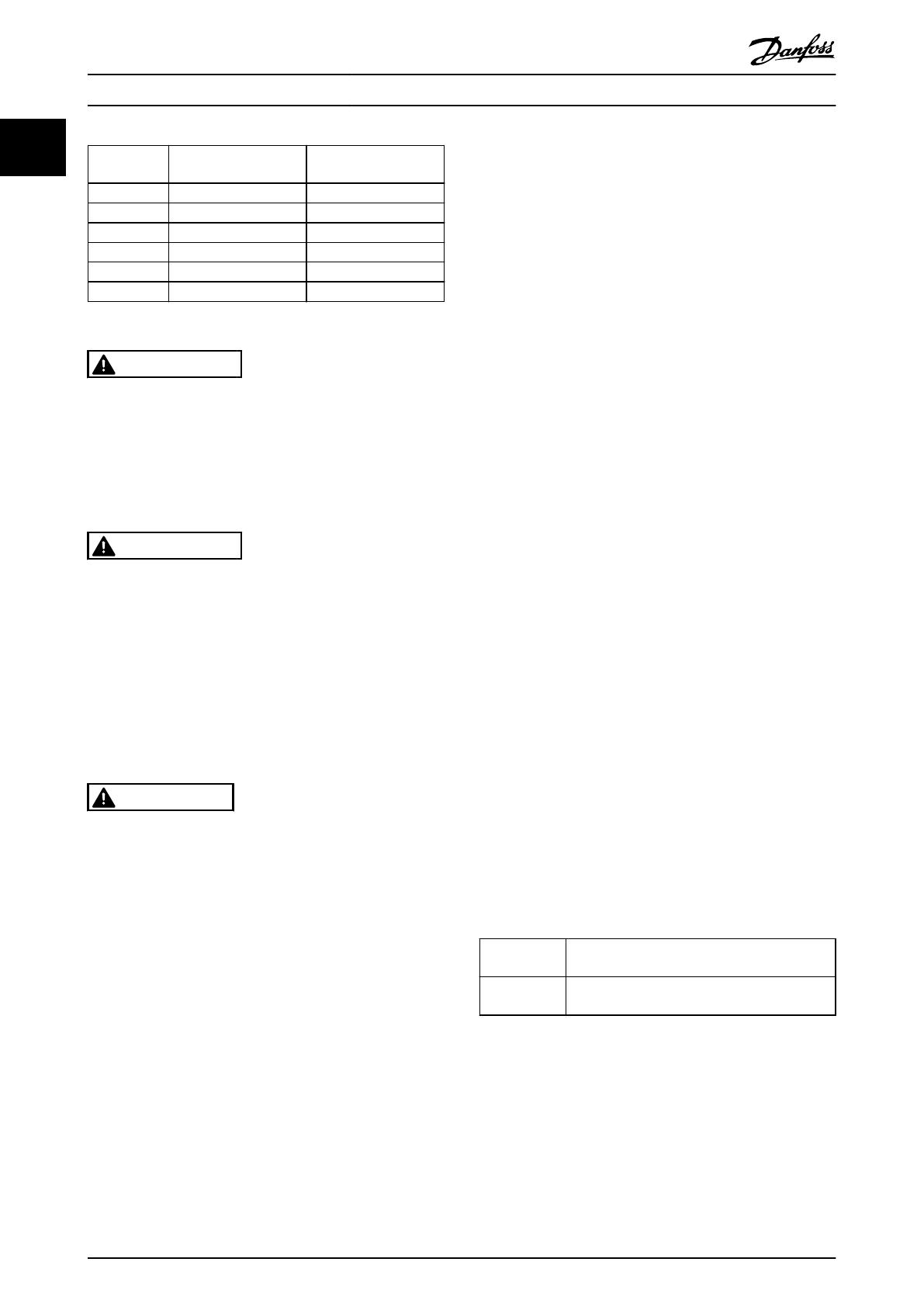
Voltage [V] Power range [kW(hp)] Minimum waiting time
(minutes)
3x200 0.25–3.7 (0.33–5) 4
3x200 5.5–11 (7–15) 15
3x400 0.37–7.5 (0.5–10) 4
3x400 11–90 (15–125) 15
3x600 2.2–7.5 (3–10) 4
3x600 11–90 (15–125) 15
Table 1.2 Discharge Time
WARNING
LEAKAGE CURRENT HAZARD
Leakage currents exceed 3.5 mA. Failure to ground the
frequency converter properly can result in death or
serious injury.
•
Ensure the correct grounding of the equipment
by a certified electrical installer.
WARNING
EQUIPMENT HAZARD
Contact with rotating shafts and electrical equipment
can result in death or serious injury.
•
Ensure that only trained and qualified
personnel perform installation, start-up, and
maintenance.
•
Ensure that electrical work conforms to national
and local electrical codes.
•
Follow the procedures in this manual.
CAUTION
INTERNAL FAILURE HAZARD
An internal failure in the frequency converter can result
in serious injury, when the frequency converter is not
properly closed.
•
Ensure that all safety covers are in place and
securely fastened before applying power.
1.5 Additional Resources
•
VLT HVAC Basic Drive FC 101 Quick Guide provides
basic information on mechanical dimensions,
installation, and programming
•
VLT HVAC Basic Drive FC 101 Design Guide
provides information on how to design motor
control systems.
•
Danfoss VLT
®
Energy Box software. Select PC
Software Download at www.danfoss.com/Busines-
sAreas/DrivesSolutions.
VLT
®
Energy Box software allows energy
consumption comparisons of HVAC fans and
pumps driven by Danfoss frequency converters
and alternative methods of flow control. Use this
tool to project the costs, savings, and payback of
using Danfoss frequency converters on HVAC
fans, pumps, and cooling towers.
Danfoss technical literature is available in electronic form
on the documentation CD that is shipped with the
product, or in print from your local Danfoss sales office.
MCT 10 Setup Software Support
Download the software from http://www.danfoss.com/
BusinessAreas/DrivesSolutions/Software+MCT10/
MCT10+Downloads.htm.
During the installation process of the software, enter
access code 81463800 to activate FC 101 functionality. A
licence key is not required for using FC 101 functionality.
The latest software does not always contain the latest
updates for frequency converters. Contact the local sales
office for the latest frequency converter updates (*.upd
files), or download the frequency converter updates from
www.danfoss.com/BusinessAreas/DrivesSolutions/
fc101driveupdates.
1.6
Definitions
Frequency Converter
I
VLT, MAX
The maximum output current.
I
VLT,N
The rated output current supplied by the frequency
converter.
U
VLT, MAX
The maximum output voltage.
Input
The connected motor can start and stop via LCP and
digital inputs. Functions are divided into 2 groups, as
described in Table 1.3. Functions in group 1 have higher
priority than functions in group 2.
Group 1
Reset, coast stop, reset and coast stop, quick
stop, DC brake, stop, and [Off].
Group 2
Start, pulse start, reversing, start reversing, jog,
and freeze output.
Table 1.3 Control Commands
Motor
f
JOG
The motor frequency when the jog function is activated
(via digital terminals).
f
M
The motor frequency.
f
MAX
The maximum motor frequency.
Introduction
VLT
®
HVAC Basic Drive FC 101
4 Danfoss A/S © 11/2014 All rights reserved. MG18B402
1
1






















