Page is loading ...

1.WHAT IS SUPPLIED?
Standard upon delivery of an AUBO Robots kit:
(HND-GRP)
(GRP-CPL-062)
(HND-TIP-START-KIT)
(CBL-COM-2065-10-HF)
(ACC-ADT-USB-RS485)
Hand-E
Gripper Coupling
Fingertip Starting Kit
High-Flex Device Cable
USB to RS485 Adapter
Necessary Hardware
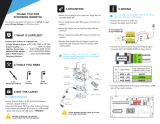
2.TOOLS YOU NEED
5.WIRING
4.MOUNTING
This step-by-step guide will allow you to install and
use your Hand-E Gripper on AUBO Robots.
3.GET THE LATEST
PLEASE READ THE INSTRUCTION MANUAL
BEFORE OPERATING THE GRIPPER.
• Download the plugin from the Aubo FAQ website
https://aubo-robotics.com/faqs/
• Download the plugin on a USB stick.
• The red (24V) and black (0V) wires of the device cable
(CBL-COM-2065-10-HF) provide power to the Gripper.
• Connect the red wire to a 24V pin.
• Connect the black wire to a 0V pin.
• Connect the communication wires in the USB converter
(ACC-ADT-USB-RS485) as shown.
• Connect the USB converter to the Aubo controller.
• Mount the coupling (GRP-CPL-062) on your robot arm.
Align with the provided dowel pin.
• Secure using the provided M6 screws and tooth lock
washers.
• Mount the Gripper (HND-GRP) on the coupling. Align
with the dowel pin.
• Secure using the provided M5 screws and tooth lock
washers.
• Plug the device cable (CBL-COM-2065-10-HF) into the
Gripper’s pigtail cable and attach the cable along the
robot arm using a cable routing system.
THANK YOU FOR
CHOOSING ROBOTIQ
LEAVE ENOUGH EXCESS CABLE TO ALLOW
FULL ROBOT MOVEMENT.
4 mm
Hex Key
2 mm
Slotted Screwdriver
(not included)
485+
485-
485 GND
(1)
(2)
(3)
1
2
3
4
5
!!
(CBL-COM-2065-10-HF)
WHITE
Pin Signal Name
1
2
485 + (A)
SHIELD
CBL-COM-2065-10-HF
High-Flex Device Cable
GREEN
3
485 GND
485 - (B)
(Gripper)
(M5 screws
and washers)
(M6 screws
and washers)
(Gripper coupling)
(Dowel pin)
CAREFUL !
FRAGILE PINS

T: 1.418.380.2788 option 3
June 2021
X-990099-B
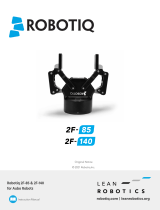
6.SOFTWARE INSTALLATION
HAND-E
QUICK START GUIDE
robotiq.com/support
• Have a USB stick that contains the plugin (step 3).
• When booting the robot, close the Aubo UI by taping the
X icon on the top right corner and navigate to the file
manager of Ubuntu
• Copy the plugin file from the USB stick to: /Home/Aubo-
RobotWorkSpace/OUR-i5/bin/Plugin
• Restart the controller from the teach pendant
For installation on
AUBO robots
• Go to the Control tab.
• Use the sliders to set the desired speed, force, and
position of the gripper
• Use the Action button to move the gripper to the
desired position
• Use the Open and Close buttons to fully open or fully
close the gripper
8. TEST AND JOG
THE GRIPPER
7. GRIPPER ACTIVATION
• Go to the Extensions tab on the top of the AUBORPE
• Enter the ID of the gripper (default for ROBOTIQ
grippers is 9)
• Connect to the gripper by pressing the Connect button
• Press the Activate Gripper button to activate the
button
9. USE NODES TO PROGRAM
WITH THE GRIPPER
• Go to the Peripheral tab
• Tap the Gripper button to add a Gripper node to the
program
• Tap the Gripper node in the program tree to access the
Gripper Condition tab
• Set the proper ID (default is 9 for ROBOTIQ grippers)
and set the position, speed, and force values desired
• Tap the Confirm button to complete the node
X-990099-B
elearning.robotiq.com
/