Page is loading ...

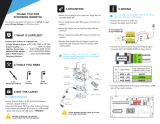
1.WHAT IS SUPPLIED?
Standard upon delivery of an AUBO Robots kit:
(GRIPPER-2F85 or -2F140)
(GRP-CPL-062)
(AGC-PARA-KIT)
(CBL-COM-2065-10-HF)
(ACC-ADT-USB-RS485)
2-Finger Adaptive Gripper
Gripper Coupling
Parallel Locking Pins
High-Flex Device Cable
USB to RS485 Adapter
Necessary Hardware
2.TOOLS YOU NEED
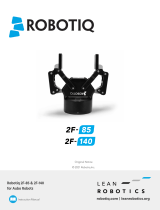
4.MOUNTING
This step-by-step guide will allow you to install and use
your 2-Finger Gripper on AUBO robots.
3.GET THE LATEST
BEFORE OPERATING THE GRIPPER,
PLEASE READ INSTRUCTION MANUAL.
THANK YOU FOR
CHOOSING ROBOTIQ
3 mm
Hex Key
4 mm
Hex Key
2 mm
Hex Key
!
• Download the plugin from the Aubo FAQ website
https://aubo-robotics.com/faqs/
• Download the plugin on a USB stick.
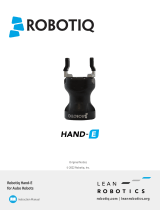
5.WIRING
• The red (24V) and black (0V) wires of the device cable
(CBL-COM-2065-10-HF) provide power to the Gripper.
• Connect the red wire to a 24V pin.
• Connect the black wire to a 0V pin.
• Connect the communication wires in the USB converter
(ACC-ADT-USB-RS485) as shown.
• Connect the USB converter to the Aubo controller.
485+
485-
485 GND
(1)
(2)
(3)
1
2
3
4
5
WHITE
Pin Signal Name
1
2
485 + (A)
SHIELD
CBL-COM-2065-10-HF
High-Flex Device Cable
GREEN
3
485 GND
485 - (B)
!
LEAVE ENOUGH EXCESS CABLE TO ALLOW FULL
ROBOT MOVEMENT.
* The dowel pin is meant to have a tight t on the robot side and a
slip t on the eector side of the assembly.
**The dowel pin is meant to have a tight t on the robot side and a slip t
on the eector side of the assembly.
• Mount the coupling (GRP-CPL-062) on your robot arm.
Align with the provided dowel pin*.
• Fix using the provided M6 screws (use of threadlocker is
recommended).
• Mount the Gripper (GRIPPER-2F85 or -2F140) on the
coupling. Align with the dowel pin*.
• Fix using the provided M5 screws and lock washers.
• Plug the device cable (CBL-COM-2065-10-HF) into the
Gripper’s pigtail and fix the cable along the robot arm
using a cable routing system.

2F-85 & 2F-140
ADAPTIVE GRIPPERS
QUICK START GUIDE
T: 1.418.380.2788 option 3
April 2019
V1.0
support.robotiq.com
New product has a 1-year warranty from the above date.
Refer to your product instruction manual for details.
For installation on
AUBO Robots
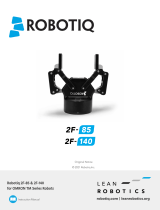
9. USE NODES TO PROGRAM
WITH THE GRIPPER
6.SOFTWARE INSTALLATION
7. ACTIVATE
THE GRIPPER
8. TEST AND JOG
THE GRIPPER
• Have a USB stick that contains the plugin (step 3).
• When booting the robot, close the Aubo UI by taping the
X icon on the top right corner and navigate to the file
manager of Ubuntu
• Copy the plugin file from the USB stick to: /Home/Aubo-
RobotWorkSpace/OUR-i5/bin/Plugin
• Restart the controller from the teach pendant
• Go to the Extensions tab on the top of the AUBORPE
• Enter the ID of the gripper (default for ROBOTIQ
grippers is 9)
• Connect to the gripper by pressing the Connect button
• Press the Activate Gripper button to activate the
button
• Go to the Control tab.
• Use the sliders to set the desired speed, force, and
position of the gripper
• Use the Action button to move the gripper to the
desired position
• Use the Open and Close buttons to fully open or fully
close the gripper
• Go to the Peripheral tab
• Tap the Gripper button to add a Gripper node to the
program
• Tap the Gripper node in the program tree to access the
Gripper Condition tab
• Set the proper ID (default is 9 for ROBOTIQ grippers)
and set the position, speed, and force values desired
• Tap the Confirm button to complete the node
/