Page is loading ...

INSTALLATION AND
OPERATING INSTRUCTIONS
Handling
technology
GPP/GPD5000IL series
"The Hybrid"
THE KNOW-HOW FACTORY
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
IO-
Link
www.IO-Link.com

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
Content:
1. Supporting documents 3
2. Proper use 3
3. Personnel qualication 3
4. Safety notes 3
5. Product description 4
5.1 GPP5000IL function (NO/NC) 4
5.2 GPD5000IL function (NO/NC) 5
5.3 GPP/GPD5000IL function (N) 5
6. Installation 5
6.1 Safety notes 5
6.2 Installing the gripper 5
6.3 Installing the gripper ngers 6
6.4 Static charge 6
6.5 Inuencing the position sensor 6
6.6 Pneumatic connection 6
7. Commissioning 6
7.1 IO-Link commissioning 6
7.2 Control 7
7.3 LED display 8
7.4 Process data 8
7.5 Control with cyclical process data 9
7.5.1 Procedure for data transfer 9
7.5.2 "ControlWord" parameter 10
7.5.3 "DeviceMode" parameter 11
7.5.4 "WorkpieceNo." parameter 11
7.5.5 "TeachPosition" parameter 12
7.5.6 "PositionTolerance" parameter 12
7.5.7 "StatusWord" parameter 13
7.5.8 "Diagnosis" parameter 13
7.5.9 "ActualPosition" parameter 14
7.6 Sensing of end positions 14
7.7 Service parameters 14
7.7.1 StatusWord 0x40 14
7.7.2 Diagnostics 0x41 14
7.7.3 Cycle counter 0x42 15
7.7.4 System temperature 0x43 15
7.7.5 ControlWord 0x44 15
7.7.6 Error code 0x45 15
7.7.7 Error code 0x46 15
7.7.8 Operating seconds counter 0x47 15
7.7.9 ActualPosition 0x100 16
7.7.10 TeachPosition 0x101 16
7.7.11 WorkpieceNo. 0x102 16
7.7.12 DeviceMode 0x103 16
7.7.13 PositionTolerance 0x104 16
7.7.14 Current operating pressure 0x110 16
7.7.15 Pressure switch bottom 0x111 17
7.7.16 Pressure switch top 0x112 17
7.7.17 Pressure hysteresis 0x113 17
7.7.18 Base/Work position switching thresholds 0x114 17
7.7.19 Movement detection 0x115 17
8. Error diagnostics 18
9. Accessories 19
10. Glossary 20
11. Maintenance 21
12. Fault exclusion 21
13. Installer's Declaration (in accordance with the Machinery Directive) 22
14. Declaration of Conformity (in accordance with the EMC Directive) 23
15. Your notes 24
2

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
1. Supporting documents
• Catalog
• Drawings, performance data, information about accessory parts, etc.
• General terms and conditions, including warranty information
Note:
The following documents are available for download on our website.
Only the documents currently available on the website are valid.
Note:
The gripper should only be used in its original state with its original accessories, without any unauthorized
changesandwithinthescopeofitsdenedparametersforuse.
Zimmer GmbH shall accept no liability for any damage caused by improper use.
2. Proper use
3. Personnel qualications
Installation, commissioning and operation may be undertaken by trained specialists only. They must have read and understood the
installation and operating instructions in full.
3
The gripper is designed exclusively for operation using a 24 V DC power supply.
The operating pressure is in the range of 3-8 bar for standard grippers and 4-7 bar for the respective NC/NO versions.
The gripper is used as dened under "Proper use" in enclosed rooms to temporarily grip, handle and hold parts.
The gripper is not suitable for clamping workpieces during a machining process.
Direct contact with perishable goods/food is not permitted.
1. Installation, commissioning, maintenance and repairs may only be performed by qualied experts in accordance with
these installation and operating instructions.
2. The gripper is state-of-the-art. It is tted to industrial machines and is used to hold workpieces. The following are ex-
amples of situations in which the gripper may cause a hazard:
- the gripper is not properly tted, used or maintained
- the gripper is not used for its intended purpose
- failure to observe the local regulations (legislation, guidelines, directives), such as the EC Machinery
Directive,
- the Accident Prevention Regulations (UVV) and the assembly and operating instructions
are not observed.
3. The gripper may be used only in accordance with its proper use and technical data.
ZIMMER GmbH shall accept no liability for any damage caused by improper use.
4. Any use other than the proper use requires written approval from Zimmer GmbH
5. Make sure that the energy supply is disconnected and before you install, retool, maintain or repair the gripper.
6. In case of maintenance, renovation or expansion work, remove the gripper from the machine and carry out the work
outside the danger zone.
7. When commissioning or testing, make sure that the gripper cannot be actuated by mistake.
8. Modications to the gripper, such as adding drill holes or threads, may be made only with prior approval from Zimmer
GmbH.
9. The specied maintenance intervals and compressed air quality specications are to be observed; also refer to the
Maintenance section. When using the gripper under extreme conditions (see Item 11), the maintenance interval must
be adapted depending on the extent of the contamination. Please contact our hotline for this purpose.
10. Use of the gripper under extreme conditions, such as aggressive liquids and abrasive dust, is subject to prior approval
from Zimmer GmbH
11. When disassembling grippers with integrated springs, exercise increased caution because spring tension is always
present.
4. Safety notes

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
The gripper ngers of the parallel gripper are arranged successively on two shared
steel guide rails and can be moved alongside each other.
Compressed air that moves a piston is used to supply power.
The stroke movement of the piston is diverted to both gripper jaws via a connect-
ing rod.
This generates the movement of the gripper jaws.
An internal spring is used to retain the gripping force when there is a drop in pres-
sure.
NO NC
5.1 GPP5000IL function (NO/NC)
The gripper is suitable for outward gripping. (NO = normally open)
The gripper is suitable for inward gripping. (NC = normally closed)
4
5. Product description
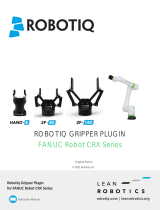
• Alternating ventilation moves the internal pneumatic piston 1
up and down.
• The power generated in this process is transferred 2 to
the gripper jaws 3 via a kinematic system to produce the
gripping force.
• The double-lip seal 5 reliably prevents lubricant from
escaping and guarantees protection with IP 64 from the
exterior.
• Integrated gripping force safety device 4 (only for NC / NO)
Spring inserted in the cylinder chamber used for energy
storage
• The pneumatic piston is controlled by integrated
3/2 NC 24 V DC directional valves. 6
• Communication is carried out over an IO-Link interface 7.
The 3-jaw concentric grippers from the GPD5000IL series
operate according to the same principle.
3
2
5
4
1
6
7
3
2
5
4
1
7
6
INFORMATION:
Useofltered,compressedair,oil-free,inaccordancewithENISO8573-1,Class3.4.3
Note:
The gripping force safety device with an integrated spring as an energy storage unit is only available
fortheNCandNOversions.TheNversionhasno gripping force safety device in either gripping direction.

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
6. Installation
6.1 Safety notes
6.2 Installing the gripper
CAUTION:
Bleed the pressure supply and switch o the power supply for the electronics before any assembly, installation
or maintenance work.
► Risk of injury
The gripper can be installed from several sides on a mounting surface that meets the specications for evenness.
If the length of the mounting surface is <100 mm, the permitted unevenness is <0.02 mm.
If the length of the mounting surface is >100 mm, the permitted unevenness is <0.05 mm.
The following work steps are to be carried out to install the gripper:
► Insert centering sleeves/alignment pins into the provided matching parts on the gripper.
► Position the gripper on the intended mounting surface using the centering sleeves/alignment pins.
► Secure the gripper with cylinder screws of strength class 8.8.
► Connect the M12 5-pin supply cable for the IO-Link Port Class B.
5
NO
NC
5.2 GPD5000IL function (NO/NC)
The gripper ngers of the three-jaw gripper are each positioned between two
steel guide rails.
Compressed air that moves a piston is used to supply power.
The stroke movement of the piston is diverted to both gripper jaws via a
connecting rod.
This generates the movement of the gripper jaws
An internal spring is used to retain the gripping force when there is a drop in
pressure.
The gripper is suitable for outward gripping. (NO = normally open)
The gripper is suitable for inward gripping. (NC = normally closed)
5.3 GPP/ GPD5000IL function (N)
The gripper ngers of the three-jaw gripper are each positioned between two
steel guide rails.
Compressed air that moves a piston is used to supply power.
The stroke movement of the piston is diverted to both gripper jaws via a
connecting rod.
This generates the movement of the gripper jaws.
There is no gripping force retention in the event of a pressure or voltage loss.
The gripper is suitable for outward or inward gripping.

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
7. Commissioning
6
7.1 IO-LINK commissioning
Pin Color Function Explanation
1 Brown
+24V DC sensor Power supply for IO-Link communication
2 White
+24V DC actuator Actuator supply voltage
3 Blue
GND sensor Sensor 0 V DC supply voltage
4 Black
C/Q IO-Link communication
5 Gray
GND actuator Actuator 0 V DC supply voltage
► Connecting the gripper to the IO-Link master
► Ensuring the supply voltage (for Port Class A additional supply via Y-cable)
NOTE:
For details on the tightening torque, screw diameter and maximum weight and length of the gripper ngers, refer to
the product data sheet.
Many dierent non-conductive parts move around in the gripper. As a consequence, high voltages can arise as a result of
electrostatic charges, which can also discharge to the component. If this is not desired, it must be ensured that the gripper can be
discharged of electrostatic charges via its mounting surface.
6.4 Static charge
NOTE:
Grounding the gripper attachment is recommended if parts sensitive to electrostatic discharge come into contact
with the gripper.
Before installing the gripper ngers, make sure they are of a suitable length for the selected gripper variant.
The following work steps should be performed to install the gripper ngers:
► Insert centering sleeves into the provided matching parts on the gripper jaws
► Position the gripper ngers on the gripper jaws using the centering sleeves
► Secure the gripper ngers using cylinder screws with strength class of at least 8.8
6.3 Installing the gripper ngers
6.5 Inuencing the position sensor
In the adjacent gure, an area in which no magnets or components with
ferromagnetic properties may be fastened is marked.
This can have a signicant inuence on accuracy of the position sensor and/
or result in a malfunction of the position sensor.
NOTE:
The position sensor itself must never be covered up by fer-
romagnetic attachment or design elements.
6.6 Pneumatic connection
7 Connection "R": Exhaust air with
mounted silencer
8 Connection "S": Exhaust air with
mounted silencer
9 Connection "P": Compressed air
8
7
9
INFORMATION:
The pneumatic connections A and B right on the gripper are not used and are closed.
For applications with an IP64 protection class, we recommend installing hoses on the "R" and "S" connections
for diverting the exhaust air to prevent the condensate from damaging the silencers.
8
9
7

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
7.2 Control
The gripper is controlled via IO-Link by means of the cyclical process data, with a minimum cycle time of 5 ms. During a communi-
cation cycle the IO-Link master sends 8 bytes to the gripper and receives 6 bytes of process data.
IO-Link master
Fieldbus or PLC
7
The gripper is controlled via IO-Link by means of the cyclical process data and the acyclical service data, with a cycle time of 5 ms.
During a communication cycle the IO-Link master sends 8 bytes to the gripper and receives 6 bytes of process data.
If the gripper is operational, a "1" must be sent in the "ControlWord" during a cold start for safety reasons. This "1" tells the gripper to
accept the current values that have been transmitted in the process data.
The gripper is now ready for operation. The gripper then moves to the proper position after receiving the corresponding command
in the "ControlWord" (decimal 256 or 512).
The gripper features bidirectional behavior. This means that the gripper cannot position itself on intermediate values. Each move-
ment command is executed to the maximum possible position.
When the hardware conguration is complete and the IO-Link connection to the gripper is established,
some data must already be visible in the process input data.
Some control systems demand a byte swap to bring this process data into a sequence that makes sense.
► To determine whether a byte swap is necessary, you can check Bit 6 [GripperPLCActive] in the "StatusWord".
► For this purpose, it is necessary to determine whether bit 6 [GripperPLCActive] is active in the rst or second status byte.
This bit must be the only one active in this byte.
If bit 6 in the rst byte is active, a byte swap still has to be applied here.
If bit 6 in the second byte is active, the bytes already have the correct sequence and you can continue with the rest of
the commissioning.
INFORMATION:
For more information, refer to the "StatusWord" section
INFORMATION:
It is mandatory to carry out a verication of the process data
► Importing the IODD (device description) into the control system
Go the website https://ioddnder.io-link.com
Search for "Zimmer Group" in the search window that appears
Select the desired device and download the corresponding *.zip les
The complete content of the zip les is required for importing within the control
INFORMATION:
The IODD le can also be downloaded from
the product datasheet on our website.
Picture shown as example

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
Name Data type
Outputs
Inputs
ControlWord
WorkpieceNo.
TeachPosition
RESERVE
ActualPosition
Diagnostics
Status
GPP/GPD5000ILControl system
UINT 16
UINT 8
UINT 8
UINT 16
UINT 16
UINT 16
UINT 16
Name Data type
DeviceMode.
PositionTolerance
UINT 8
UINT 8
8
7.4. Process data
It is possible to control the gripper solely by the process data transmitted in each IO-Link cycle. To use this method of control,
a "0" must be continuously transmitted in the workpiece number.
As a result, the currently applied process data is used as a process parameter.
Unlike the gripping force and the "TeachPosition," the "ControlWord" and the "WorkpieceNo." are always valid!
If the gripper is controlled via the stored workpiece records, the values entered there are used as the current values. As a result, the
process data words "gripping force" and "TeachPosition" are devalued. The "WorkpieceNo." parameter is to be recognized as being
a selector switch.
7.3 LED display
The color of the LED reects the status of the gripper.
Status Function
Green
On continuously Teach position
Flashing
Not currently assigned
Blue
On continuously Base position/Work position
Flashing
Not currently assigned
Red
On continuously The gripper has a fault
Flashing No IO-Link connection is available
Orange
On continuously Gripper is in undened position
Flashing
Not currently assigned
The gripper is connected to the IO-Link master by a 5-pin M12 connector, in accordance with Port Class B. In doing so,
pin 1 (24 VDC) and pin 3 (0 VDC) are for supplying power.
Pin 2 (24 VDC) and pin 5 (0 VDC) are required for auxiliary power supply to the gripper.
Pin 4 is used for IO-Link communication between the gripper and the IO-Link master.
The actuator supply voltage acts on the internal valves. As a result of this voltage being switched-o, the valves will no longer be
able to be switched. In the event of an emergency (switch-o of the actuator voltage), the gripper bleeds the pistons and, depending
on the design of the gripper (N, NC, NO), there is no gripping force safety device present.

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
9
7.5.1 Procedure for data transfer
"FAULT ACKNOWLEDGMENT" procedure
If the gripper has a fault, the error bit is set in the status word.
This fault can be reset by sending the
ControlWord = 0x8000
.
"HANDSHAKE" procedure
The data transmission starts with the transmission of the
ControlWord = 0x00
to the gripper.
Subsequently, the response of the gripper must be tested using the
Status bit 12 = False
.
Data transmission is done by changing the corresponding process data and sending the "acquire" command by the
ControlWord = 0x01
The gripper acknowledges this with
Status bit 12 = True
.
The data transfer is completed with the
ControlWord = 0x00
and the corresponding response from the gripper by
the
Status bit 12 = False
All data that is transmitted to the gripper and is described in subsequent sections must be transmitted using the "handshake"
procedure.
INFORMATION:
This procedure is called "handshake" because it enables a "clean" transmission.
Data transmission takes place from "hand to hand" (between the control system and gripper).
NOTE:
Not all faults can be reset. There are faults for which the error message is not reset after acknowledgment. The
user must wait until the gripper resets the fault by itself.
For example: Overtemperature fault case.
In general, the gripper can be controlled only by the cyclically exchanged process data.
However, this is possible only if a "0" is transmitted in the "WorkPosition" process data word.
Since very dierent gripper jaws exist for the gripper series, the required travel path can be determined directly with the gripper or
specially calculated by hand.
The process is as follows (gripping from the outside to the inside):
Step 1:
Insert the workpiece and set the "MoveToWork" bit (ControlWord = 512/0x200) by means of the "ControlWord" parameter.
This command makes the gripper move toward "WorkPosition" until it touches the workpiece.
Step 2:
If the gripper has been successfully stopped by the workpiece, then the corresponding travel path for this workpiece can be read
o using the actual position.
Step 3:
The travel path can be transferred to the gripper using the "TeachPosition." This allows the gripper to transmit feedback
about whether it has gripped the correct workpiece to the control system using the "Teach" bit in the "StatusWord"
(StatusWord = 512/0x0200). It may be necessary to adjust the position tolerance.
Step 4
To use this method, a "0" must be transmitted to the gripper in the WorkpieceNo." parameter.
Steps 1 and 2 can be repeated for as many workpieces as desired, and this allows dierent workpieces to be gripped securely
using the gripper.
The "StatusWord" parameter always tells the controller whether the gripper has gripped the workpiece.
7.5 Control with cyclical process data.
INFORMATION:
The status of the gripper should be used to check whether a workpiece has been gripped correctly.
The position measurement resolution is 0.01 mm.
The position measurement accuracy is 0.01 mm.
If the "ActualPosition" parameter is used for detecting the workpiece, then uctuations around the exact value
must be taken into consideration during start-up.

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
10
Outputs: Process data from the IO-Link master to the GEP/GED5000IL
Bit 0: "Datatransfer":
Setting this bit causes the gripper to take over the data transmitted in the process data ("WorkpieceNo." = 0) or the data
stored in the workpiece data records ("WorkpieceNo." = 1 to 31) as the active data set.
Bit 1: "WritePDU":
Setting this bit tells the gripper that it should write the current process data to the selected
workpiece recipe.
Bit 2: "ResetDirectionFlag":
Setting this bit tells the gripper that the direction ag needs to be reset. This makes it possible to repeatedly move to a
position. This is useful when switching workpiece recipes.
Bit 3: "Teach"
Setting this bit tells the gripper to save the current position as the "TeachPosition" in the selected "WorkpieceNo."
7.5.2 "ControlWord" parameter
Structure of the control word
Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8
Byte 1
Error
Reset
- - - - - "MoveToWork" "MoveToBase"
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Byte 0
Adjust - - - Teach ResetDirectionFlag- WritePDU Data transfer
INFORMATION:
This only works if no "0" is transmitted in the workpiece No.!
INFORMATION:
For more information on the dierent data sets of the "Adjust" parameter, refer to the "End positions" section.
Bit 8: "MoveToBase"
Setting this bit tells the gripper that it should move to the "BasePosition."
Bit 9: "MoveToWork"
Setting this bit tells the gripper that it should move to the "WorkPosition."
Bit 15: This bit can be used to acknowledge all errors that can be reset and thus reset them.
You can nd out whether an error is present from the error list.
Bit 7: "Adjust":
If no other bit is set in the control word, the "adjust" bit can be used to readjust the end position of the ngers. The "adjust"
bit has to be set briey. Afterwards, the gripper runs through an automated routine, which runs through a gripping cycle in
order to learn the end positions.
Decimal value Hexadecimal value
Data transfer
1 0x1
WritePDU
2 0x2
Teach
8 0x8
Adjust
128 0x80
MoveToWork
256 0x100
MoveToBase
512 0x200
Error Reset
32,768 0x8000
Note:
In the "ControlWord" parameter, only one single bit may be set at a time.
Only the values listed in the following table are valid.

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
11
7.5.3 "DeviceMode" parameter
7.5.4 "WorkpieceNo." parameter
If a "0" is transmitted, the "TeachPosition" transmitted in the process data is considered valid for the gripper.
This parameter is used both for selecting the already stored workpiece data and for selecting the workpiece number record in order
to store it in the current process data.
Example: To use the data stored in workpiece record 3 ("PositionTolerance," "TeachPosition" and "DeviceMode"), a 3 (workpiece
number = 3) must be transmitted in the workpiece number of the process data.
INFORMATION:
For more information on the use of dierent data records of the parameter
"WorkpieceNo." refers to the "Work with workpiece numbers" section.
Details
Name WorkpieceNo.
Data type UINT 8
Permission Write
Transmission Cyclical
Value range 0 - 32
This parameter is used to transmit the desired operating mode to the gripper.
Mode number Function
2 Switches valves o
100 Universal operation, internal and external gripping (N)
Details
Name DeviceMode
Data type UINT 8
Permission Write
Transmission Cyclical
Value range 0–255
INFORMATION:
All transmitted process data must be acquired using the "ControlWord" = 0x01 "Data transfer."
Details
Name ControlWord
Data type UINT 16
Permission Write
Transmission Cyclical
Value range 0–65535

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
12
The stroke measurement system has a resolution of the position of 1/100 mm.
Product Stroke per gripper jaw Maximum "TeachPosition" (approx.)
GPP/GPD5006IL 6 mm 1200
GPP/GPD5008IL 8 mm 1600
GPP/GPD5010IL 10 mm 2000
Example: Explanation of the values using GPP5006IL
Full stroke of 6mm per gripper jaw:
"BasePosition" = 0
"WorkPosition" = 1200 (2*6*100 => 2 gripper jaws * 6 mm stroke per gripper jaw * Resolution at 1/100 mm)
The "TeachPosition" can acquire values from 0 to 1200
Details:
Name TeachPosition
Data type UINT 16
Permission Write
Transmission Cyclical
Value range 0–max. jaw stroke of the gripper
7.5.6. "PositionTolerance" parameter
This parameter can be used to transmit the current desired position detection tolerance for the workpiece to the gripper. Also see
Section 6.3.4
This can be input in mm/100 and always functions equally well in both the "+" direction and the "-" direction.
Details
Name Position tolerance
Data type UINT 8
Permission Write
Transmission Cyclical
Value range 0–255
INFORMATION:
All transmitted process data must be acquired using the "ControlWord" = 0x01 "Data transfer."
Refer to "HANDSHAKE" procedure
7.5.5 "TeachPosition" parameter
The "TeachPosition" process data byte is only valid if, at the same time, the workpiece number is "0".
The "TeachPosition" tells the gripper the position at which the workpiece is expected. The "PositionTolerance" parameter can be
used to set a tolerance range around this position. Thus the gripper can distinguish whether a correct or incorrect workpiece has
been gripped. Conrmation that the correct workpiece has been gripped is communicated to the controller via the "StatusWord"
(input). If the detection is correct, the "teach" bit is set in this status word, thereby giving the user the option to monitor this work
step.

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
13
Inputs: Process data from the IO-Link master to the GEP/GED5000IL
7.5.7. "StatusWord" parameter
Structure of the status word
Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8
Byte 1
Error
ControlWord
0x200
ControlWord
0x100
Data transfer
ok
undenedPosition WorkPosition TeachPosition BasePosition
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Byte 0
-
GripperPLC
Active
- - - - - -
INFORMATION:
For checking the correct gripping of the workpiece, the use of the "StatusWord" is
recommended.
The "TeachPosition" tolerance can be adjusted in another process parameter.
If the actual position is used to sense the correct position, the tolerances and uctuations of the value must be
observed during programming!
Details
Name StatusWord
Data type UINT 16
Permission Write
Transmission Cyclical
Value range 0–65535
Bit 6: This bit is active as soon as the gripper has booted up after the cold start. This bit can be used to
verify a byte swap.
Bit 8: Active if the gripper is set to "BasePosition"
Bit 9: Active if the gripper is set to "TeachPosition"
Bit 10: Active if the gripper is set to "WorkPosition"
Bit 11: Active if the gripper is not set to any Teach Position
Bit 12: This bit is used for data transmission with the handshake.
This bit is active as soon as data has been taken over by the gripper by the parameter "ControlWord"=1 (DEZ)
Bit 13: This bit is a direction ag and is active when the last movement order was in the "BasePosition" direction
Bit 14: This bit is a direction ag and is active when the last movement order was in the "WorkPosition" direction
Bit 15: Error in the gripper. If this bit is active, the error message can be dened using the "Diagnostics" parameter.
7.5.8 "Diagnosis" parameter
The value returned in the "Diagnostics" parameter corresponds to the "Diagnostics code."
► refer to the "Error diagnostics" section
Details:
Name: Diagnostics
Data format: UINT16
Permission: Read
Transmission: Cyclical
Value range: 0 to 65535

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
14
7.5.9 "ActualPosition" parameter
Details:
Name: ActualPosition
Data format: UINT16
Permission: Read
Transmission: Cyclical
Value range: 0 to max. jaw stroke of the gripper
The "ActualPosition" parameter corresponds to the current position of the gripper jaws with respect to the full stroke of the gripper
and scaled to 0.01 mm.
Example: For a GPP5006IL gripper:
Depiction of the left gripper ngers:
Depiction of right gripper ngers:
Depiction of workpiece:
"Actual position" = "0" corresponds to the "Gripper to BasePosition" status (open): ...............
"Actual position" = "800" corresponds to the "Gripper to TeachPosition" status (workpiece gripped):
"Actual position" = "1200" corresponds to the "Gripper to WorkPosition" status (closed):
7.6 Sensing of end positions
Two bits in the "status" parameter give feedback about the end positions.
The "BasePosition" bit (status = 768) is set when the base position is reached.
Accordingly, the "WorkPosition" bit (status = 1024) is set when the "WorkPosition" is reached.
The gripper is preset at the factory to have its end positions sensed at the maximum potential stroke of the gripper.
For special gripper jaws, if necessary, the end positions can be reset using an automated traversing routine. This means that the
"WorkPosition" or "BasePosition" will reference itself again accordingly.
► To this end, the "adjust" bit must be set in the "ControlWord" = 2048 for at least 2 seconds
The requirement here is that no additional bit is set in the "ControlWord"
If this bit is canceled before the end of the traversing routine, the procedure must be repeated because in this case the end
positions have not been correctly determined.
Warning:
At the gripper, a movement is triggered immediately when the bit is set!
► Risk of injury
► Before setting the bit, check whether the movement range of the gripper is clear.
7.7 Service parameters
7.7.1 Status 0x40
7.7.2 Diagnostics 0x41
Details:
Name: StatusWord
Data format: UINT16
Permission: Read
Transmission: Acyclical
Details:
Name: Diagnostics
Data format: UINT16
Permission: Read
Transmission: Acyclical
Service data is not exchanged cyclically in each communication cycle. This data is exchanged only acyclically upon request of the
IO-Link master. Transmission of this acyclical data occurs over multiple communication cycles.
This parameter can be used to read out the "StatusWord" of the gripper.
This parameter can be used to read out the "DiagnosisWord" of the gripper.
Note: Corresponds to the process data eld

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
15
7.7.3 Cycle counter 0x42
Details:
Name: Cycle counter
Data format: UINT32
Permission: Read
Transmission: Acyclical
This parameter can be used to read out the total number of cycles of the gripper.
During each gripping cycle, this parameter is incremented.
7.7.4 System temperature 0x43
7.7.5 ControlWord 0x44
Details:
Name: System temperature
Data format: INT16
Permission: Read
Transmission: Acyclical
Details:
Name: ControlWord
Data format: UINT16
Permission: Read
Transmission: Acyclical
This parameter can be used to read out the current temperature of the electronics of the gripper.
This parameter can be used to read out the current ControlWord of the electronics of the gripper.
7.7.6 Error code 0x45
Details:
Name: ErrorcodeDataformat STRING
Data format: UINT16
Permission: Read
Transmission: Acyclical
This parameter can be used to read out the fault status as a string.
7.7.8 Operating seconds counter 0x47
Details:
Name: Operating seconds counter
Data format: UINT32
Permission: Read
Transmission: Acyclical
This parameter can be used to read out the current operating time of the electronics of the gripper within seconds.
7.7.7 Error code 0x46
Details:
Name: Error counter
Data format: UINT32
Permission: Read
Transmission: Acyclical
Returns the number of the faults that have occurred since the last restart.

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
16
7.7.9 ActualPosition 0x100
Details:
Name: ActualPosition
Data format: UINT16
Permission: Read
Transmission: Acyclical
Value range: 0–max. jaw stroke of the gripper
The "ActualPosition" corresponds to the current position of the gripper jaws with respect to the full stroke of the gripper, scaled to
1/100 mm.
7.7.10 TeachPosition 0x101
Details:
Name: TeachPosition
Data format: UINT16
Permission: Read
Transmission: Acyclical
This parameter can be used to read out the "TeachPosition" of the gripper that is currently being transmitted.
7.7.11 WorkpieceNo. 0x102
Details:
Name: WorkpieceNo.
Data format: UINT8
Permission: Read
Transmission: Acyclical
This parameter can be used to read out the workpiece number of the gripper that is currently being transmitted.
7.7.12 DeviceMode 0x103
7.7.13 PositionTolerance 0x104
Details:
Name: DeviceMode
Data format: UINT8
Permission: Read
Transmission: Acyclical
Details:
Name: PositionTolerance
Data format: UINT8
Permission: Read
Transmission: Acyclical
This parameter can be used to read out the driving mode of the gripper that is currently being transmitted.
This parameter can be used to read out the tolerance of the "TeachPosition" of the gripper that is currently being transmitted.
7.7.14 Current operating pressure 0x110 -
Details:
Name: ActualPressure
Data format: UINT8
Permission: Read
Transmission: Acyclical
This parameter can be used to read out the current operating pressure of the gripper. [in 1/10 bar]

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
17
7.7.15 Pressure switch bottom 0x111
Details:
Name: Low Pressure Error Threshold
Data format: UINT8
Permission: Read/write
Transmission: Acyclical
This can be used to dene the minimum operating pressure (in increments of 0,1 bar) of the gripper, below which a diagnostic mes-
sage is output.
7.7.16 Pressure switch top 0x112
Details:
Name: Pressure switch high
Data format: UINT16
Permission: Read
Transmission: Acyclical
This can be used to dene the maximum operating pressure (in increments of 0,1 bar) of the gripper, above which a diagnostic
message is output.
7.7.17 Pressure hysteresis 0x113
Details:
Name: PressureHysteresis
Data format: UINT8
Permission: Read/write
Transmission: Acyclical
This parameter can be used to specify the hysteresis-range of the pressure switch [in increments of 0,01 bar].
7.7.18 Base/Work position switching thresholds 0x114
Details:
Subindex 1: From the BasePosition to the outside
Subindex 2: From the BasePosition to the inside
Subindex 3: From the WorkPosition to the inside
Subindex 4: From the WorkPosition to the outside
Subindex 0: All 4 values at once
Name: Base/WorkPosition switching thresholds
Data format: UINT16 or UINT16[4]
Permission: Read/write
Transmission: Acyclical
This parameter can be used to change the position switching thresholds for the Base- and WorkPosition.
7.7.19 Movement detection 0x115
Details:
Name: Movement Threshold
Data format: UINT16
Permission: Read/write
Transmission: Acyclical
With this, the threshold of the movement detection can be adjusted.

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
18
8. Error diagnostics
Diagnostics
message
Error Possible causes Measures
0x0 No error - -
0x100
The actuator power supply is not
available
• Actuator power supply not
connected
• Cable break
• Actuator power supply not
sucient
► Test of the actuator power supply
voltage
0x101
Max. permitted temperature
exceeded
• Ambient temperature too high
• Gripper is overloaded
► Provide sucient ventilation/cooling
► Check the object to be gripped or the
gripper jaw
0x102
Temperature below min.
permitted temperature
• Ambient temperature too low ► Provide a sucient operating
temperature
0x104 Operating pressure too high
• Pressure in pressure supply set
too high
► Install the pressure control valve to
reduce the operating pressure
N: max. 8 bar
NC/NO: max. 7 bar
0x105 Operating pressure too low
• Pressure supply not connected
• Line break
• Pressure in pressure supply set
too low
► Check the pressure supply
(at least 2 bar)
0x300
The congured "ControlWord" is
implausible
• Multiple bits are set in the
"ControlWord."
► Only one bit may be active on the
"ControlWord."
0x301
The congured teach position is
outside the permitted range
• Wrong value on the "TeachPosition" ► Test of the "TeachPosition"
parameters
Permissible range, depending on
design size.
Max. position value corresponds to
the back jaw stroke x 200
e.g.:
HRC with approx. 12 mm
Jaw stroke:
0 ≤ "TeachPosition" ≤ 1200
0x304
The congured tolerance value
is outside the permitted range
• Wrong value on the
"PositionTolerance" parameter
► Test of the "PositionTolerance"
parameters
Permitted range:
0 < "PositionTolerance" ≤ 255
0x305
The device has an incorrect
reference position
• Gripper does not have any
reference position
Zimmer Group Service
0x306
The congured "DeviceMode" is
not plausible
• Wrong value on the "DeviceMode"
parameter
• Modied process data were not
taken over
► Adjusting the "DeviceModes"
Universal = 100
Grip workpiece outside = 60
Grip workpiece inside = 70
0x307
Movement order cannot be
carried out
• Multiple move commands to the
same direction
• Move command transmitted
despite existing error
► Reset direction ag and resend move
command.
0x308 "WorkpieceNo." not available
• Transmitted workpiece number is
outside the permitted range 0 to 32
• Modied process data were not
taken over
► Check the values of the
"WorkpieceNo." parameter
► Take over the process data with a
"Handshake"

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
19
Diagnostics
message
Error Possible causes Measures
0x309
"TeachPosition" does not
correspond to the active value in
the gripper
• Process data sent by the master
has been changed
► Conrming the newly transmitted
process data with a "Handshake"
"ControlWord" = 0x1
0x30F
Teach position tolerance does
not correspond to the active
value in the gripper
0x310
"DeviceMode" sent by the
master does not correspond to
the active value in the gripper
0x311
"WorkpieceNo." sent by the
master does not correspond to
the active value in the gripper
0x312
Initial status after a gripper
restart
• After a restart, a one-time data
takeover through "ControlWord"
= 1 must be carried out
► Conrming the current process data
with a "Handshake" "ControlWord" = 0x1
0x404 Error of the position sensor
• Fault of the integrated position
sensor
► Check whether the integrated position
sensor is influenced by an external
magnetic field
► Ensure the necessary distance between
the sensor and ferromagnetic materials
Zimmer Group Service
0x406 System error • Internal system error
Zimmer Group Service
9. Accessories
If any accessories not sold or authorized by Zimmer Group are used, the function of the gripper cannot be guaranteed.
The accessory range of the Zimmer Group is specically tailored to and certied for the individual grippers.
Corresponding optional accessories or those included in the scope of supply can be found in the respective product data sheets at
www.zimmer-group.com.

DDOC00247 enu / 2018-09-14 / Index a
INSTALLATION AND OPERATING INSTRUCTIONS: Pneumatic gripper, intelligent GPP/GPD5000IL series
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
Phone: +49 7844 9138-0
●
Fax: +49 7844 9138-80
●
www.zimmer-group.de
20
10. Glossary
Term/
abbreviation
Description
"BasePosition"
Base position
Initial position from which the gripper moves
"WorkPosition"
Work position,
Any position of the gripper within the maximum and minimum possible movement range
"TeachPosition"
Teach position,
for conditioning the gripper to the workpiece.
"ActualPosition"
Current position,
Position of the gripper jaws with respect the maximum
possible stroke
"ControlWord"
Control word,
Parameter for command execution
"DeviceMode"
Process parameter,
Switch that changes between movement proles of the gripper
"Workpiece No."
Workpiece number,
Option for saving multiple recipes
"PositionTolerance"
Position tolerance,
referring to the tolerance of the teach position
HRC
Human-Robot-Collaboration
Status Display parameter
Diagnostics
Diagnostics
Display parameter = error number
Oset Value for the subsequent correction of a parameter
"GripForce"
Gripping force
Value in the data set of the controller
Direction
Command/signal from the controller
Specication of the movement direction of the gripper jaws
Normal N The gripper can be used for both external and internal gripping (no gripping force safety device).
normally open
NO The gripper is set up for external gripping.
With gripping force safety device
normally closed
NC The gripper is set up for internal gripping.
With gripping force safety device
GND Ground/power supply 0V
Workpiece No.
Workpiece number
Designation of the data set in the control system
GPD Pneumatic gripper/three-jaw version
GPP Pneumatic gripper/two-parallel-jaw version
Traversing routine
Traversing routine
Dened process for moving the gripper jaws
Travel path
Travel path
Path on which the gripper jaws travel
Adjust
adjust
The gripper carries out an adjustment run
/