Page is loading ...

INSTALLATION AND
OPERATING
INSTRUCTIONS
HRC-03 series
Gripper, electric
DDOC00268
THE KNOW-HOW FACTORY
www.zimmer-group.com

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
2
DDOC00268 / g EN / 2020-01-10
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
Parameter explanation (glossary)
Parameter Explanation
ControlWord
The gripper is controlled with the "ControlWord".
The "ControlWord" is bit-exclusive, which means that only one bit at a time can be
active in the "Word". The value "ZERO" is also permitted.
DeviceMode
The "DeviceMode" is used to select gripping proles as well as the additional help
modes in the gripper.
Workpiece No.
Using this parameter, workpiece recipes stored in the gripper can be selected or
saved.
TeachPosition The "TeachPosition" is the actual workpiece position.
WorkPosition
The "WorkPosition" is the inner jaw position on the gripper. Depending on the
application, for example with internal grippers, this can also be the standby position.
GripForce The "GripForce" parameter is used to congure the gripping force.
PositionTolerance
This is the tolerance window for the "TeachPosition", "BasePosition" and
"WorkPosition". The value of the parameter acts in both directions.
BasePosition
The "BasePosition" is the outer "JawPosition". Depending on the gripper prole, this
can also be a work position!
ShiftPosition
The "ShiftPosition" is a switching position between pre-positioning and gripper
movement.
StatusWord
In its bits, the "StatusWord" supplies the most important information about the status
of the gripper back to the control system.
Diagnosis
If an error should occur, the "Diagnosis" outputs a diagnostic code which can be
compared with the error list.
ActualPosition The value of the current position of the gripper [1/100 mm].
Error Fault, error message
DIR
Direction/24V cable connection - Depending on the gripper, this signal is used to
move the gripper.
Teach/Adjust
Program/Congure
Using this signal, depending on the gripper type, the current position of the gripper
jaws can be taught in as the new workpiece position. "Adjust" is used as a command
to dene the reachable end positions of the gripper jaws.
GND Abbreviation for ground connection
Oset Correction value
Traversing routine Dened procedure for movement of the gripper jaws
Travel path Path on which the gripper jaws travel
LED Light-emitting diode
HRC Human-robot collaboration

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
3
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
DDOC00268 / gEN / 2020-01-10
Contents
1. Supporting documents ....................................................................................................................................................... 5
2. Safety notice ........................................................................................................................................................................5
3. Proper use ............................................................................................................................................................................6
4. Personnelqualication .......................................................................................................................................................6
5. Product description .............................................................................................................................................................6
5.1 Possible applications ........................................................................................................................................................................................ 6
5.2 Forces and torques ...........................................................................................................................................................................................6
5.3 Type plate ......................................................................................................................................................................................................... 7
5.4 Criteria for use in collaborative applications .................................................................................................................................................. 7
6. Function ...............................................................................................................................................................................8
6.1 Electricalspecications ....................................................................................................................................................................................8
6.2 LED display ....................................................................................................................................................................................................... 9
6.2.1 “IO-Link” LED display ......................................................................................................................................................................9
6.2.2 LED display “digital + integrated analog sensing” ........................................................................................................................9
6.3 Veriedconguration ........................................................................................................................................................................................ 9
6.4 Protection classes .............................................................................................................................................................................................9
6.5 Technical data .................................................................................................................................................................................................10
6.6 Self locking mechanism .................................................................................................................................................................................10
7. Installation ..........................................................................................................................................................................10
7.1 Safety notice ....................................................................................................................................................................................................10
7.2 Installation of the mechanical system ...........................................................................................................................................................10
7.2.1 General installation information ....................................................................................................................................................10
7.2.2 “IO-Link” installation .....................................................................................................................................................................11
7.2.3 “IO-Link” installation with adapter plate ......................................................................................................................................12
7.2.4 “Digital + integrated analog sensing” installation .......................................................................................................................13
7.2.5 “Digital” installation .......................................................................................................................................................................14
7.3 Installation of the electrical system ................................................................................................................................................................15
7.3.1 Installation of the wiring ................................................................................................................................................................15
7.3.2 “Digital” and “Digital + integrated analog sensing” ....................................................................................................................15
7.3.3 “IO-Link” installation ......................................................................................................................................................................16
7.4 Static charge ...................................................................................................................................................................................................16
7.5 Heat dissipation...............................................................................................................................................................................................16
7.6 Installation of accessories ..............................................................................................................................................................................16
8. Commissioning .................................................................................................................................................................. 17
8.1 “Analog” and “Digital” commissioning..........................................................................................................................................................17
8.1.1 Restart “Analog“ and “Digital“ ......................................................................................................................................................17
8.1.2 “Analog” and “Digital” switching sequence .................................................................................................................................17
8.2 IO-Link commissioning ...................................................................................................................................................................................18
8.2.1 Process data ...................................................................................................................................................................................18
8.2.2 IODD import ...................................................................................................................................................................................19
8.3 “Handshake” data transfer method ............................................................................................................................................................... 19
8.4 Parameter ........................................................................................................................................................................................................20
8.4.1 “ControlWord” parameter .............................................................................................................................................................20
8.4.2 “DeviceMode” parameter .............................................................................................................................................................. 21
8.4.3 “WorkpieceNo” parameter ............................................................................................................................................................ 21
8.4.4 “PositionTolerance” parameter .....................................................................................................................................................22
8.4.5 “GripForce” parameter ..................................................................................................................................................................22
8.4.6 “TeachPosition” parameter ...........................................................................................................................................................23
8.4.7 “StatusWord” parameter ...............................................................................................................................................................23
8.4.8 “Diagnosis” parameter ..................................................................................................................................................................24
8.4.9 “ActualPosition” parameter ........................................................................................................................................................... 25
8.5 “Cold boot” ...................................................................................................................................................................................................... 25

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
4
DDOC00268 / g EN / 2020-01-10
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
8.6 Minimum travel path .......................................................................................................................................................................................25
8.7 “Easy Startup” .................................................................................................................................................................................................26
8.7.1 “Easy Startup” HRC-03 series ......................................................................................................................................................26
8.8 Starting gripping movement ..........................................................................................................................................................................27
8.9 Repeated movement in the same direction .................................................................................................................................................. 27
8.9.1 “Save recipe” ..................................................................................................................................................................................28
8.10 Recipe examples “Load recipe” ....................................................................................................................................................................29
9. Operation ...........................................................................................................................................................................30
9.1 “Analog” and “Digital + integrated analog sensing” ...................................................................................................................................30
9.1.1 “Analog” and “Digital + integrated analog sensing” emergency release ................................................................................. 30
9.1.2 “Analog” and “Digital + integrated analog sensing” adjustable gripping force ....................................................................... 31
9.2 “IO-Link” ..........................................................................................................................................................................................................32
9.2.1 “IO-Link” emergency release .......................................................................................................................................................32
9.2.2 “IO-Link” adjustable gripping force ..............................................................................................................................................33
10. Gripping force charts ........................................................................................................................................................33
11. Troubleshooting ................................................................................................................................................................. 34
12. Maintenance ......................................................................................................................................................................36
13. Accessories/scope of delivery .........................................................................................................................................36
14. Transportation/storage/preservation ..............................................................................................................................36
15. Decommissioning and disposal .......................................................................................................................................36
16. RoHS declaration ..............................................................................................................................................................37
17. REACH declaration ...........................................................................................................................................................37
18. Declaration of Incorporation .............................................................................................................................................38
19. Declaration of Conformity ................................................................................................................................................. 39

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
5
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
DDOC00268 / gEN / 2020-01-10
1. Supporting documents
NOTICE:
Read through the installation and operating instructions carefully before installing the product!
The installation and operating instructions contain important notes for your personal safety. They
must be read and understood by all persons who work with or handle the product during any phase
of the product life time.
The documents listed below are available for download on our website.
Ö www.zimmer-group.com
Only those documents currently available on the website are valid.
• Catalogs, drawings, CAD data, performance data
• Information on accessories
• Detailed installation and operating instructions
• Technical data sheets
• General Terms and Conditions of Business, including warranty information
2. Safety notice
CAUTION:
Non-compliance may result in severe injuries!
1. Installation,commissioning,maintenanceandrepairsmayonlybeperformedbyqualiedspecialistsin
accordance with these installation and operating instructions.
2. Thegripperisstate-of-the-art.Itisttedtoindustrialmachinesandisusedtoholdworkpieces.Thefollowingare
examples of situations in which the gripper may pose a hazard:
• The gripper is not properly installed, used or maintained.
• The gripper is not used for its intended purpose.
• Local regulations (legislation, ordinances, guidelines), such as the EC Machinery Directive, accident
prevention regulations and the installation and operating instructions, are not observed.
3. The gripper may be used only in accordance with its proper use and technical data. Zimmer GmbH shall accept no
liability for any damage caused by improper use.
4. Any use other than the intended use requires written approval from Zimmer GmbH.
5. Make sure that the power cables are disconnected before you install, modify, maintain or repair the gripper.
6. In case of maintenance, conversion or expansion work, remove the gripper from the machine and perform the work
outside the danger zone.
7. When commissioning or testing, make sure that the gripper cannot be activated by mistake.
8. Modicationstothegripper,suchasaddingdrilledholesorthreads,maybemadeonlywithpriorapprovalfrom
Zimmer GmbH.
9. Thespeciedmaintenanceintervalsaretobeobserved;alsorefertothe“Maintenance”section.Whenthegripper
is used under extreme conditions, the maintenance interval must be adapted depending on the extent of the
contamination. Please contact our hotline for this purpose.
10. Use of the gripper under extreme conditions, such as aggressive liquids and abrasive dusts, is subject to prior
approval from Zimmer GmbH.
11. Thesuitabilityofthegripperforcollaborativeusecanonlybeveriedwhileusinggripperngersinstalledinfactory
condition.Ifdifferentgripperjawsareusedoriftheoriginalgripperjawsaremodied,compliancewiththe
maximumforceandpressurevaluespermittedforcollaborativeoperationmustbeveriedonceagain.
12. Do not reach into the operational range of the gripper!

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
6
DDOC00268 / g EN / 2020-01-10
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
3. Proper use
NOTICE:
The gripper is to be used only in its original state with its original accessories, without any
unauthorizedchangesandwithinthescopeofitsdenedparametersofuse.
Zimmer GmbH shall accept no liability for any damage caused by improper use.
Useoutsideofthedenedparametersisnotpermitted.Unauthorizedelectricalormechanicalmodicationsmustnot
be made.
The gripper is designed exclusively for electric operation using a supply voltage of 24 VDC.
Thegripperisusedasdenedunder“Properuse”inenclosedroomsfortemporarilygripping,handlingandholding
workpieces in human-robot collaboration.
The gripper is not suitable for clamping workpieces during a machining process.
Direct contact with perishable goods/food is not permitted.
4. Personnel qualication
Installation,commissioningandmaintenancemayonlybeperformedbyqualiedpersonnel.Thesepersonnelmust
have read and understood the installation and operating instructions in full.
5. Product description
NOTICE:
To ensure that the gripper jaws do not get deformed, care must be taken to ensure that the
congurationofthegrippingforceandtheselectionofthegripperngerlengthiscorrect.
Anincorrectcongurationorselectioncanleadtomalfunction.
CAUTION:
Reduction of gripping force
Reducethegrippingforceofthegripperwhengrippingexiblecomponents.
A reduced gripping force can lead to material damage or injury to personnel, because the
components that are being gripped can no longer be securely gripped and transported.
5.1 Possible applications
Inside gripping:
The gripper can be used for inside
gripping.
Outside gripping:
The gripper can be used for outside
gripping.
5.2 Forces and torques
INFORMATION:
For information on forces and torques, please visit our website.
Zimmer Customer Service is available to provide you assistance if you have any further questions.
Inside grippingOutside gripping

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
7
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
DDOC00268 / gEN / 2020-01-10
5.3 Type plate
There is a type plate attached to the housing of the gripper.
The serial number and the article number are shown on this type plate.
• The serial number ensures that the unit has an unambiguous, continuous
classicationintheeventofanupdateoranoverhaul.
• You should assign the serial number to your project when possible.
Ö Example: Serial number 01-12345678
INFORMATION:
Please state the serial number in the event of damage or a complaint.
Zimmer Customer Service is available to provide you assistance if you have any further questions.
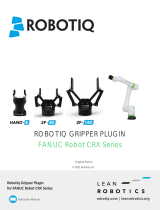
5.4 Criteria for use in collaborative applications
The criteria listed below are the basis for the suitability of the
gripper for use in collaborative applications:
Ö Seeadjacentillustration,gure3 and 4.
• The gripper has been designed in accordance with the
specicationsofISO/TS15066.
• The power of the motor in combination with the
transmission design and the pre-assembled gripper jaws
isnotsucienttogenerateagrippingforce>140N
upon vulnerable areas of the body. The gripping forces
generatedwhengrippingsoftobjectsaresignicantly
reduced, since the amount of dynamic force is lowered.
Compliance with the maximum permitted gripping force
hasbeenveriedusingasuitablemeasuringinstrument.
• The gripper is engineered to be inherently safe and is
designed with rounded edges and shapes that prevent
crushing and shearing points from being created.
3 4
1 2
Automation cell Coexistence
Cooperation Collaboration
Separated workspaces Presence detection
Shared workspacesZones of action

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
8
DDOC00268 / g EN / 2020-01-10
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
6. Function
Thegripperngersoftheparallelgripperarearrangedparalleltoeachotherontwoopposingguiderailsandcanbe
moved relative to each other. The force of the motor is transmitted over a worm drive. A pinion and a rack generate the
movement of the gripper jaws and synchronize these movements.
Despiteitssmallinstallationspace,thegripperisqualiedforthegrippingofawiderangeofformtandfrictionalt
parts and can easily be integrated into the existing control system. The gripping force can be adapted optimally to the
workpiece conditions.
You can optionally adjust the gripping force onto the workpiece by means of the integrated potentiometer or over the
control system via IO-Link. The gripper can be controlled like a valve via I/O ports or via IO-Link. Both versions are easy
to integrate into the control system.
6.1 Electrical specications
INFORMATION:
Forinformationonelectricalspecications,pleasevisitourwebsite.
Thisdatavarieswithintheseriesdependingonthespecicdesign.
Zimmer Customer Service is available to provide you assistance if you have any further questions.
1
Control
2
Mounting and positioning
3
LED display/plastic ring
4
Gripper jaws

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
9
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
DDOC00268 / gEN / 2020-01-10
6.2 LED display
6.2.1 “IO-Link” LED display
ThecolorsoftheLEDringreectthestatusofthegripper.
The LED ring enables a 360° status display.
Status Function
On continuously
"TeachPosition"
Flashing
Currently not assigned
On continuously "BasePosition"
Flashing Currently not assigned
On continuously The gripper has a fault
Flashing No IO-Link connection available
On continuously Gripper is in undened position
Flashing Currently not assigned
6.2.2 LED display “digital + integrated analog sensing”
6.3 Veried conguration
INFORMATION:
Forinformationabouttheveriedconguration,pleasevisitourwebsite.
Zimmer Customer Service is available to provide you assistance if you have any further questions.
6.4 Protection classes
NOTICE:
The gripper achieves protection class IP40 in all mounted positions of installation.
cl
Power/communication
cm
Error

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
10
DDOC00268 / g EN / 2020-01-10
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
6.5 Technical data
INFORMATION:
For information on technical data, please visit our website.
Thisdatavarieswithintheseriesdependingonthespecicdesign.
Zimmer Customer Service is available to provide you assistance if you have any further questions.
6.6 Self locking mechanism
INFORMATION:
The gripper has a mechanical self locking mechanism to ensure that the workpiece remains held by
the gripper in the event of power supply loss or failure (such as an emergency stop).
Zimmer Customer Service is available to provide you assistance if you have any further questions.
7. Installation
7.1 Safety notice
NOTICE:
Switch off the energy supply for the electronics before any assembly, installation or maintenance
work.
► Electronics may get damaged.
CAUTION:
Switch off the energy supply for the electronics before any assembly, installation or maintenance
work.
► Injuries are possible.
WARNING:
Risk of injury in case of unexpected movement of the machine or system into which the gripper is to
be installed.
► Switch off the power supply to the machine before all work.
► Secure the machine against being switched on unintentionally.
► Check the machine for any residual energy.
7.2 Installation of the mechanical system
7.2.1 General installation information
NOTICE:
TheLEDringorplasticringandtheadapterangemustbeabsolutelyushwitheachotherbefore
pulling out the grub screws (“IO-Link”) or fastening screws (“digital + integrated analog sensing”).
Non-compliance may result in property damage.

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
11
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
DDOC00268 / gEN / 2020-01-10
7.2.2 “IO-Link” installation
Thegripperandtherobotareconnectedtoeachotherviaanadapterange.
Thegrippermustbeinstalledonamountingsurfaceinaccordancewiththelevelnessspecications.
Length < 100 mm permitted unevenness < 0.02 mm
Length>100mm permitted unevenness < 0.05 mm
The following work steps must be observed during installation:
► Unscrew the four grub screws 8andwithdrawtheadapterange6 from the gripper housing.
► Positiontheadapterange6ontherobotheadormediaangeusingthestraightpin2a.
► Mounttheadapterange6 ontherobotheadormediaangeusingthemountingscrews2b.
Ö A suitable screw-in depth has to be chosen for the application.
Ö Recommended screw-in depth = at least 1.5xØ
Ö Mounting screws are included in the scope of delivery.
Ö Strength class of the mounting screws at least 8.8 Ö DIN EN ISO 4762.
Ö Observe the tightening torque of the mounting screws.
Ö Makesurethemountingsurfaceissucientlyrigidandlevel.
► Reinsertthegripperintheadapterange6. Ö While doing so, observe the positions of the
straight pin bl or the centering device 9 and the LED ring 3 .
► Screw the four grub screws 8 into the drilled holes 7again and tighten.

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
12
DDOC00268 / g EN / 2020-01-10
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
7.2.3 “IO-Link” installation with adapter plate
The gripper and the robot are connected to each other
via an adapter plate.
The gripper must be installed on a mounting surface in
accordancewiththelevelnessspecications.
Length < 100 mm permitted unevenness < 0.02 mm
Length>100mm permitted unevenness < 0.05 mm
The following work steps must be observed during
installation:
► Position the adapter plate bn on the
robot using the straight pin 2a.
► Mount the adapter plate bn on the robot
using the mounting screws 2a.
► Unscrew the four grub screws 8 and
withdrawtheadapterange6 from the
gripper housing.
► Positiontheadapterange6 on the
reducer for the adapter plate bm or media
angeusingthestraightpin2 a.
► Mounttheadapterange6 on the
adapter plate bmormediaangeusing
the mounting screws 2 a.
► Position the adapter plate bm or media
angeontheadapterplatebn using the
straight pin 2 a.
► Reinsert the gripper into the adapter
ange6 .
► Screw in the four grub screws 8 again
and tighten.
Ö Therobotangeadapterplatebn has a
pitch circle diameter (PCD) of 50 mm.
Ö A suitable screw-in depth has to
be chosen for the application.
Ö Recommended screw-in depth =
at least 1.5xØ
Ö Mounting screws are included in the
scope of delivery.
Ö Strength class of the mounting
screws at least 8.8
Ö DIN EN ISO 4762.
Ö Observe the tightening torque of the
mounting screws.
Ö Make sure the mounting surface is
sucientlyrigidandlevel.

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
13
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
DDOC00268 / gEN / 2020-01-10
7.2.4 “Digital + integrated analog sensing” installation
Ö There is no LED ring for this gripper variant. A single-color plastic ring 3 replaces the LED ring.
Thegripperandtherobotareconnectedtoeachotherviaanadapterange.
Thegrippermustbeinstalledonamountingsurfaceinaccordancewiththelevelnessspecications.
Length < 100 mm permitted unevenness < 0.02 mm
Length>100mm permitted unevenness < 0.05 mm
The following work steps must be observed during installation:
► Unscrew the two fastening screws 8 and withdraw the sleeve bm and the plastic ring 3.
► Position the straight pin 2a into the drilled hole 2aoftheadapterange6 that is required for
positioning.
Ö There are four positioning options available.
► Screw two mounting screws 2b into the designated installation hole 2b and install the adapter
ange6 ontherobotheadormediaange.
Ö A suitable screw-in depth has to be chosen for the application.
Ö Recommended screw-in depth = at least 1.5xØ
Ö Mounting screws are included in the scope of delivery.
Ö Strength class of the mounting screws at least 8.8 Ö DIN EN ISO 4762.
Ö Observe the tightening torque of the mounting screws.
Ö Makesurethemountingsurfaceissucientlyrigidandlevel.
► Slide the sleeve bm and the plastic ring 3onthegripperandpositionontheadapterange6 .
► Attach the sleeve bmontheadapterange6 using the two fastening screws 8.

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
14
DDOC00268 / g EN / 2020-01-10
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
7.2.5 “Digital” installation
The gripper and the robot are connected to each other
viaanadapterange.
The gripper must be installed on a mounting surface
inaccordancewiththelevelnessspecications.
Length < 100 mm permitted unevenness < 0.02 mm
Length>100mm permitted unevenness < 0.05 mm
The following work steps must be observed during
installation:
► Unscrew the two fastening screws 8 and withdraw
the sleeve bm and the plastic ring 3.
► Position the straight pin 2a into the drilled hole
2aoftheadapterange6 that is required for
positioning.
Ö There are four positioning options
available.
► Screw two mounting screws 2b into the
designated installation hole 2b and install the
adapterange6 on the robot head or media
ange.
Ö A suitable screw-in depth has to
be chosen for the application.
Ö Recommended screw-in depth
= at least 1.5xØ
Ö Mounting screws are included in the
scope of delivery.
Ö Strength class of the mounting screws
at least 8.8 Ö DIN EN ISO 4762.
Ö Observe the tightening torque of the
mounting screws.
Ö Make sure the mounting surface is
sucientlyrigidandlevel.
► Slide the sleeve bm and the plastic ring 3 on the
gripperandpositionontheadapterange6 .
► Attach the sleeve bmontheadapterange6 using the two fastening screws 8.
INFORMATION:
Ö There is no LED ring for this gripper variant. A single-color plastic ring 3 replaces the LED ring.
Ö This gripper variant features a cutout cl in the sleeve bmforadjustingthemagneticeldsensors.
➔ This only applies to the gripper with a digital sensor.
➔ Grippers for which analog sensors are used do not require this cutout.

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
15
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
DDOC00268 / gEN / 2020-01-10
7.3 Installation of the electrical system
7.3.1 Installation of the wiring
• Connect the supply cable to the gripper and the control system.
► Youcanndthecorrespondingsupplycableonour
website
► www.zimmer-group.com
INFORMATION:
The cables that are used by Zimmer GmbH feature a minimum bending radius of 10 x the outer
diameter.
This bending radius must not be undershot!
► All IO-Link cables that are installed in grippers have an outer diameter of 5 mm and thus a bending
radius of 50 mm.
► Freely suspended cables must be secured to prevent excessive motion loads or pinching.
7.3.2 “Digital” and “Digital + integrated analog sensing”
INFORMATION:
For information on the “Digital” and “Digital + integrated analog sensing” grippers, refer to the “robot-
specic”installationandoperatinginstructions(DDOC00268-01).
These“robot-specic”installationandoperatinginstructionsareincludedwiththegripperaswelland
can be found on our website.
Zimmer Customer Service is available to provide you assistance if you have any further questions.

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
16
DDOC00268 / g EN / 2020-01-10
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
7.3.3 “IO-Link” installation
HRC-03-072840
HRC-03-072844
PIN assignment of the power supply line:
PIN Color Function Explanation
1 Brown Sensor + 24 V DC Power supply for IO-Link communication
2 White
Actuator + 24 V
DC
Actuator supply voltage
3 Blue GND sensor Sensor 0 V DC supply voltage
4 Black C/Q IO-Link communication
5 Gray GND actuator Actuator 0 V DC supply voltage
The following steps must be carried out for commissioning or installation of the gripper with IO-Link:
• Connect the gripper to the IO-Link master.
• Ensure the voltage supply.
► For Port Class A, additional power supply via Y-cable.
7.4 Static charge
The movement of the gripper jaws create low voltages as a result of static charging. These charges cannot
be dissipated if the gripper is installed on an insulated surface and discharge is also not possible through the
workpiece.
NOTICE:
Non-compliance may result in property damage
Grounding the gripper attachment / gripper jaws is recommended if ESD-sensitive parts come into
contact with the gripper.
7.5 Heat dissipation
In the event of high ambient temperatures, the gripper has to be installed on heat-dissipating materials.
If the gripper is permanently operated under very high ambient temperatures and with fast cycle times, the service
life may be reduced.
7.6 Installation of accessories
NOTICE:
Before installing an accessory, make sure it is suitable for use with the selected variant.
For information on all available accessories, please visit our website.
Zimmer Customer Service is available to provide you assistance if you have any further questions.

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
17
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
DDOC00268 / gEN / 2020-01-10
8. Commissioning
8.1 “Analog” and “Digital” commissioning
8.1.1 Restart “Analog“ and “Digital“
INFORMATION:
When restarting the gripper, no signal must be present at PINS “DIR1” and “DIR2”.
Condition for a cold start:
„DIR1“ and „DIR2“ = 0 V
As soon as the green LED on the gripper lights up, it is ready for operation.
The gripper can be moved within a few ms of the power supply.
8.1.2 “Analog” and “Digital” switching sequence
A movement in the desired direction executes a high level of the corresponding signal.
After a high level is detected, the gripper always executes the gripper movement all the way to the end of the
gripping process.
It is important to ensure that, after a gripper movement has taken place, the corresponding signal is reset again
before a signal in the opposite direction is given.
Between withdrawing the signal and the next command, a pause of 10 ms must be observed.
NOTICE:
In order to prevent damage to the gripper, the resistance between the analog output and GND must
beatleast10kΩ.
INFORMATION:
Ö Themovementproleappliestothedigitalgripperaswellastothedigitalgripperwithanalog
sensing.
The current jaw position is scaled from 0 V to 10 V and is issued via pin 5 (analog output).
BasePosition
WorkPosition
► ◄ ≥ 10 ms ► ◄ ≥ 10 ms ► ◄ ≥ 10 ms
0
1
0
1
Signal „öffnen“
Signal „schließen“
BasePosition
WorkPosition
BasePosition
BasePosition
"Open" signal
"Close" signal
WorkPosition WorkPosition
≥10ms
≥10ms ≥10ms

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
18
DDOC00268 / g EN / 2020-01-10
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
8.2 IO-Link commissioning
8.2.1 Process data
The option exists for the gripper to be controlled only by the process data transmitted in each cycle.
Outputs: Process data from the IO-Link master to the gripper!
Name Data type
ControlWord UINT 16
DeviceMode UINT 8
Workpiece No. UINT 8
TeachPosition UINT 16
GripForce UINT 8
PositionTolerance UINT 8
Name Data type
Status UINT 16
Diagnosis UINT 16
ActualPosition UINT 16
Grippers
Input
Control
system
Edition

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
19
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
DDOC00268 / gEN / 2020-01-10
8.2.2 IODD import
► Importing the IODD (device description) into the control system.
Ö Call up our website at Ö www.zimmer-group.com
Ö Selectthedesiredgripperanddownloadthecorresponding.zipleviathe“DownloadIODD”link.
Ö The“.ziple”isrequiredforimportingintothecontrolsystem.
WhenthehardwarecongurationiscompleteandtheIO-Linkconnectiontothegripperisestablished,some
data must be visible in the process input data.
Ö Some control systems demand a byte swap to bring this process data into a logical sequence.
► To determine whether a byte swap is necessary, you can view bit 6 (GripperPLCActive) in the “StatusWord”.
► Forthispurpose,itisnecessarytodeterminewhetherbit6isactiveintherstorsecondstatusbyte.
Ö Ifbit6isactiveintherstbyte,thebytesalreadyhavethecorrectsequenceandcommissioning
can be continued.
Ö If bit 6 is active in the second byte, a byte swap still has to be applied here.
Ö For further information, refer to the “StatusWord” section.
INFORMATION:
It is mandatory to verify the process data.
The control of the gripper takes place via IO-Link by means of the cyclical process data as well as the acyclical
service data with a cycle time of 5 ms.
8.3 “Handshake” data transfer method
All process data that is transferred to the gripper and is described in the sections that follow must be transferred
using the “handshake” method.
INFORMATION:
This method is referred to as a “handshake” because it enables “clean” transfer.
The process data transfer takes place, so to speak, from “hand to hand” - from the control system to
the gripper.
The following steps are required for the “handshake”:
The data transfer starts with the transfer of "ControlWord" = 0x01 to the gripper.
Subsequently, the response of the gripper must be tested by means of "Statusbit" 12 = TRUE (data trans-
fer OK).
Following this, the “ControlWord” = 0 can be sent, which ends the data transfer.
The operator automatically concludes the data transfer with the “ControlWord” = 0x00 and the corre-
sponding response from the gripper via the “Statusbit” 12 = FALSE .

INSTALLATION AND OPERATING INSTRUCTIONS: 2-jaw parallel gripper, electric, HRC-03 series
20
DDOC00268 / g EN / 2020-01-10
Zimmer GmbH
●
Im Salmenkopf 5
●
77866 Rheinau, Germany
●
+49 7844 9138 0
●
+49 7844 9138 80
●
www.zimmer-group.com
8.4 Parameter
8.4.1 “ControlWord” parameter
NOTICE:
In the “ControlWord” parameter, only one single bit or the value 0 may be set at a time. Only the
values listed in the following table are valid:
Parameter Decimal value Hexadecimal value
Data transfer 1 0 x 1
WritePDU 2 0 x 2
Teach 8 0 x 8
Adjust 128 0 x 80
MoveToBase 256 0 x 100
MoveToWork 512 0 x 200
ErrorReset 32768 0x8000
Name "ControlWord"
Data format UINT16
Permission Write
Transfer Cyclical
Value range 0 to 65535
“ControlWord” structure:
Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8
Byte 1
“Error
Reset”
- - - - - "MoveToWork" "MoveToBase"
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Byte 2 "Adjust" - - - "Teach"
"ResetDirection-
Flag"
"WritePDU" "Datatransfer"
Bit 0: „Datatransfer“
► Setting this bit causes the gripper to accept the data transmitted in the process data
(“WorkpieceNo” = 0) or the data stored in the workpiece data records (“WorkpieceNo = 1 to 32)
as the active data set.
Bit 1: „WritePDU“
► Setting this bit communicates to the gripper that it should write the current process data to the
selected tool recipe.
Bit 2: „ResetDirectionFlag“
► Settingthisbitinformsthegripperthatthedirectionagneedstobereset.
► This makes a repeated movement to a position possible.
► This is logical during a switchover of workpiece recipes.
Bit 3: „Teach“
► Setting this bit informs the gripper to save the current position as the “TeachPosition” in the
selected “WorkpieceNo”.
INFORMATION:
This only works if there is no “0” that is transmitted in the workpiece number!
/