Page is loading ...

Robotiq AirPickVacuumGripper
forCB-SeriesUniversal Robots
InstructionManual
robotiq.com | leanrobotics.org
Original Notice
© 2019Robotiq Inc.

Revisions 8
1. GeneralPresentation 10
1.1. Grippernomenclature 10
1.1.1. AirPick Gripper 10
1.1.2. Suction Cup System 11
1.2. Objectpicking 12
1.2.1. Main unit suction cup 12
1.2.2. Auxiliarysystem with multiple suction cups 12
1.3. Setupandcontrol 12
2. Safety 14
2.1. Warning 15
2.1.1. Risk assessment and final application: 15
2.2. Intended Use 16
3. Installation 18
3.1. ScopeofDelivery 18
3.1.1. Robotiq AirPick Vacuum Gripper Kit 18
3.1.2. Universal RobotsWrist Connection Kit for CB-Series 19
AirPickWrist Connect Kit forURCB-Series/ One(1)cup (VAC-CB-UR-AIRPICK-KIT1-W) 19
AirPickWrist Connect Kit forURCB-Series/ Two (2)cups(VAC-CB-UR-AIRPICK-KIT2-W) 20
AirPickWrist Connect Kit forURCB-Series/ Four(4)cups(VAC-CB-UR-AIRPICK-KIT4-W) 20
3.2. RequiredToolsand Equipment 21
3.2.1. AirPick Gripper Add-On 21
3.2.2. Suction cup system 21
3.3. EnvironmentalandOperating Conditions 21
3.3.1. Air supply 22
3.3.2. Depressurizing the supplyline 22
3.4. MechanicalInstallation 22
3.4.1. Installing the Vacuum Gripper onto the robot 22
Single Gripper 22
Installationwiththe Standard Coupling Kit 22
Multiple Vacuum Grippers 23
Installationwiththe URWrist ConnectionKit forCB-Series(I/O Coupling) 24
General presentation& Nomenclatureof theI/O Coupling 24
AirPick-InstructionManual
2

Safety 25
Firmware Update 25
Mechanical Installation 26
3.4.2. Air tubing 27
Connection of thesuction cup systems 27
Connection of theairsupplyline to theAirPickVacuum Gripper 28
3.4.3. Suction cup system 29
Manifold and mounting bracket 29
Suctioncupsand airnodes 29
3.5. ElectricalSetup 30
3.5.1. Pinout interface 30
3.5.2. Coupling to controller 31
3.5.3. Coupling to tool connector 33
33
Single Gripper 33
Multiple Grippers 33
3.6. Testing the GripperwiththeRobotiq UserInterface (RUI) 34
3.7. InstallationforUniversalRobots 36
3.8. URCap Package 36
3.8.1. Installing URCap package on CB-Series 38
Single Gripper 38
Multiple Grippers 40
3.8.2. Uninstalling URCap Package 43
3.8.3. License Agreement 44
4. Software 47
4.1. Overview 47
4.1.1. Control using registers 47
4.1.2. Control over Universal Robotspackage 48
4.2. VacuumGripperregistermapping 49
4.3. Robot output registers& functionalities 49
4.4. Robot input registers&status 53
4.4.1. Single Gripper UCH-1.0.0 56
Object Detection 56
4.5. Gripperbehavior 56
3

AirPick-InstructionManual
4.5.1. Control modes 56
Automaticmode 57
Advanced mode 58
Veryporousmaterialdetection 60
Object lost/ drop behavior 60
Object secured behavior 60
Object not detected behavior 61
Object releasedelay 61
Emergencystop behavior 61
4.6. Controllogic 61
4.7. ModbusRTUcommunication 61
4.7.1. Connection setup 62
Vacuum Gripperand I/O Coupling communication 62
4.8. ControloverUniversalRobotswithURCap 63
4.8.1. Control with the Wrist Connection Kit (I/O Coupling) 63
4.8.2. Control with the Standard Coupling Kit 65
4.8.3. Vacuum Gripper Scan 66
4.8.4. Vacuum Gripper Toolbar 66
Overview 66
Features 67
4.8.5. Vacuum Gripper node 68
Command window 68
Grip Command 68
ReleaseCommand 70
Features 71
Advanced Vacuum GripperFunctions 71
5. UserInterface 73
6. Specifications 74
6.1. Technicaldimensions 74
6.1.1. Gripper 74
6.1.2. Suction Cup System 75
Manifold 75
Bracket for 2suctioncups 75
4

Bracket for 4suctioncups 76
6.1.3. Air nodes 78
6.1.4. Couplings 79
Blankcoupling 79
Coupling for ISO 9409-1-50-4-M6 80
Coupling for ISO 9409-1-31.5-4-M5 81
Coupling for ISO 9409-1-40-4-M6 82
Coupling for PCD 56 with 8 xM4 83
Coupling for PCD 56 with 6 xM4 84
Coupling for PCD 60 with 4 xM5 85
Coupling for PCD 63 with 6 xM6 86
6.2. Mechanicalspecifications 87
6.2.1. Payload and force 88
Example1:Non-porousmaterial 91
Case#2 92
Example2:Porousmaterial 92
Case#1 94
6.2.2. Center of massand tool center point 95
6.2.3. Moment Limitation 96
6.3. Electricalspecifications 96
7. Maintenance 97
7.1. VacuumGrippercleaning 98
7.2. Periodicinspection 99
Suctioncupsand airnodes 100
8. Spare Parts, Kitsand Accessories 101
9. Troubleshooting 104
9.1. Communication 104
9.2. VacuumGripperverification 106
9.3. I/O Coupling Troubleshooting 107
10. Warranty 109
10.1. I/O Coupling Warranty 110
11. Harmonized Standards, Declarationsand Certificates 111
11.1. OriginalECdeclarationofincorporation 111
5


7

Revisions
Robotiq maymodifythisproduct without notice,whennecessary,dueto product improvements,modificationsorchangesin
specifications.If suchmodification ismade,themanualwill also berevised,seerevisioninformation.Seethelatest version of this
manual onlineat:support.robotiq.com.
2019-08-15
l Add of MultipleGripperssections
2019-07-30
Add of Wrist connectionKit (I/O Coupling Kit)section
2019-06-14
Initial release
AirPick-InstructionManual
8

Copyright
© 2016-2019Robotiq Inc.All rightsreserved.
Thismanualand theproduct it describesareprotected bytheCopyright Act of Canada,bylawsof othercountries,and byinternational
treaties,and thereforemaynot bereproduced inwhole or in part,whetherforsaleornot,without priorwrittenconsent from Robotiq.
Undercopyright law,copying includestranslation into anotherlanguageorformat.
Information provided byRobotiq inthisdocument isbelieved to beaccurateand reliable.However,no responsibilityisassumed by
Robotiq for itsuse.Theremaybesomedifferencesbetweenthemanual and theproduct if theproduct hasbeenmodified afterthe
editiondate.
Theinformationcontained inthisdocument issubject to changewithout notice.
9

1.General Presentation
Theterms“Gripper”,''AirPickGripper'',''AirPickVacuum Gripper'' and ''AirPick'' used inthefollowing manualall refer to theRobotiq
AirPickVacuum Gripper.The Robotiq AirPickVacuum Gripperisaroboticperipheral designed forindustrial applications..Thevacuum
isgenerated withaventuri systemthat usescompressed airasanenergysource.Itsdesign makesit a uniqueroboticend-of-armtool to
quicklypick,placeand handlealargerangeof partsof varying sizesand shapes.
Info
Thefollowing section presentsthekeyfeaturesof theGripperand must not be considered asappropriateto the operationof
theGripper.Eachfeatureisdetailed in theappropriatesection.
Info
Thefollowing manual usesthemetricsystem.Unlessspecified,alldimensionsare inmillimeters.
1.1.Grippernomenclature
1.1.1. AirPick Gripper
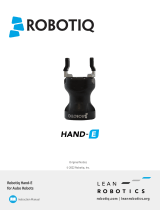
TheAirPickisavacuum Gripperthat createsavacuum via a pneumaticvacuum generator.It isequipped withoneormultiplesuction
cups.Eachsuction cup canbeadapted to yourapplicationand grasping needs.TheAirPickGripperiscompatible with theRobotiq
standard coupling interface.
Fig.1-1:Robotiq AirPickGripper
Info
Pleasereferto theScopeof Deliverysection subsection and theSpare Parts,Kitsand Accessoriessectionfordetailson
standard and optional parts.
AirPick-InstructionManual
10

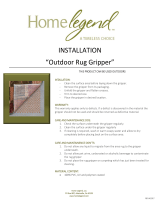
1.1.2.Suction CupSystem
A Robotiq Suction Cup System can be installed directly under the Vacuum Gripper. Each Robotiq Suction Cup System includes a
bracket,a manifold,airnodes,port plugs,bumpers,tubing and additional suctioncups.
Fig.1-2:Suctioncup system
Info
Pleasereferto theInstallationsectionformoreinformationon howto integratetheSuction Cup System to AirPick.
Info
Pleasereferto theScopeof Deliverysection subsection and theSpare Parts,Kitsand Accessoriessectionfordetailson
standard and optional parts.
Tip
Theownercanuseacustom bracket oramounting plate.Thebracket ormounting platecanbe installed directlyunderthe
manifold.
11

AirPick-InstructionManual
1.2.Object picking
TheAirPickallows:
1. Mainunit suction cup
2. Auxiliarysystemwithmultiple suctioncups
Warning
Object picking causesthecompressionof thesuctioncup(s),whichcanresult inpinching pointsbetweenthegripperand the
load.Avoid presence of bodypartsinthiszoneduring operation.
Warning
Beforepicking anynewobject ormaterial inautonomousmode,alwayscheckthat theresulting vacuum level issufficient to
ensuresafegripping,in orderto prevent dropping orejectionof theload.
1.2.1.Mainunit suctioncup
Inorderto useonlyonesuction cup,thesingle cup canbemounted right intheport of thevacuum generator.
1.2.2.Auxiliary systemwithmultiple suction cups
A standard SuctionCup Systemcanbeattached to theAirPickVacuum Gripper.The bracket normallyholdstwo orfoursuctioncups
(corresponding to thefourportsof themanifold).
Anyunused manifold port should beblocked withamating plug to avoid airleakage.
Othercustom mounting optionscanalso beused to benefit from amultiplesuctioncupssolution
Caution
Custom bracketsand platesmust meet therequired technical specifications(refer to theTechnicaldimensionssection
subsection).
1.3.Setup and control
TheVacuum Gripperispowered and controlled directlyviaasingledevicecablethat carries24VDCpower,anaircompressed cable
and ModbusRTUcommunication overRS-485.
Info
Pleasereferto theElectricalSetup sectionsubsectionforwiring information,and to theSoftwaresectionforthe control of the
Vacuum Gripper.
Inorderto beused,theAirPickGripperhasto beconnected to aGrippercoupling whichprovidesboththemechanical and electrical
connectivityto theGripper.
12

Info
Pleasereferto theMechanicalInstallationsectionformoreinformation onmounting theVacuum Gripperonto thecoupling.
Referto theTechnicaldimensionssectionforthetechnical drawing,and referto theSpare Parts,Kitsand Accessoriessection
foralist of theavailablecouplings.
TheAirPickGripperboastsanembedded object detectionfeaturewhich usesindirect sensing measurements.Thesystemthus
indicatesif theworkpiecehasbeendropped or if theGripperfailed to grasp theworkpiece.
Info
Formoreinformationregarding theobject detectionfeature,pleasereferto theSoftwaresection.
13

2.Safety
Warning
Theoperatormust haveread and understood allof theinstructionsinthefollowing manual beforeoperating theRobotiq
Vacuum Gripper.
Caution
Theterm “operator” refersto anyoneresponsibleforanyof thefollowing operationson theRobotiq Vacuum Gripper:
l Installation
l Control
l Maintenance
l Inspection
l Calibration
l Programming
l Decommissioning
Thismanualcoversthevariouscomponentsof theRobotiq Vacuum Gripperand thegeneral operationsregarding thewhole life-cycle
of theproduct,from installationto operationand decommissioning.
Thedrawingsand photosinthismanual arerepresentative examples.However,discrepanciesmaybeobserved between thevisual
supportsand the actual product.
AirPick-InstructionManual
14

2.1.Warning
Caution
Anyuse of theGripperin non-compliancewiththese warningsisdeemed inappropriateand maycauseinjuryordamage.
Warning
l Airsupplymust bedryand filtered according to ISO 8573-1class3.4.3.
l Airsupplypressuremust be between3and 7barwithan optimal pressureat 6.5bar.
l Makesurethat thetubing isproperlysecured beforepressurizing thegripper.
l Makesurethat thetubing isnot pressurized beforeremoving theairsupplytubefrom thegripper.
l Makesurethat theprovided whitesafetyclip isproperlyinstalled beforepressurizing theVacuum Gripper.
l Alwaysusethesuctioncup systemand itscomponents(airnodes,port plug,etc.)withthe Robotiq Vacuum Gripperonly.
l NeveroperatetheVacuum Gripperwithleaking orwornparts.
l TheVacuum Gripperneedsto beproperlysecured beforeoperating therobot.
l Do not install oroperateaGripperthat isdamaged orlacking parts.
l Neversupplythe Gripperwithanalternating current source.
l Makesureall cord setsarealwayssecured at bothends—Gripperand robot.
l Alwaysmeet therecommended keying forelectricalconnections.
l Makesureno individualsorassetsareinthe vicinityof therobot and/orGripperpriorto initializing therobot.
l Alwaysmeet theGripper’spayload specifications.
l Set yourvacuum level based onyourapplication.
l Keep bodypartsand clothing awayfrom theGripperwhilethedevice ispowered on.
l Do not usetheGripperon peopleoranimals.
l Neverstand undersuspended loadsheld bytheVacuum Gripper.
2.1.1.Risk assessment andfinalapplication:
TheRobotiq Vacuum Gripperismeant to beused oncobotsand industrial robots.
Therobot,theGripperand anyother equipment used inthefinal application must go through a comprehensive riskassessment
processbeforetheycanbe used.Special caremust be takenduring thisstep if custom mounting optionsare used forthe suctioncups.
Caution
It istherobot integrator’sresponsibilityto ensure that all local safetymeasuresand regulationsaremet.
15

AirPick-InstructionManual
Thefollowing non-exhaustivelist presentsrisksthat must beassessed during theintegration process:
l Riskof contact betweenbodypartsand suctioncupsduring gripping;
l Riskof load ejectionresulting from lossof vacuum;
l Riskof load dropping resulting from lossof vacuum;
l Riskof pinching betweentheVacuum Gripperand thepart(s)ortheenvironment;
l Riskof damageorbreaking if using acustom suction cup bracket that doesnot meet thetechnical requirements.
Depending on theapplication,theremaybehazardsthat requireadditional protection and/or safetymeasures.Forinstance,the
workpiecehandled bythe Grippercould beinherentlydangerousto theoperator.
Warning
Depending on thesupplysources,whenanemergencystop (e-Stop)buttonispressed,the following consequencesmay
occur.Therobot ownerhasthe responsibilityto do ariskassessment and choosetheappropriateoption.
Supplysources e-Stop consequences
Robot tool supply
(tool connector)
Powerfailureto theVacuum Gripper.The vacuum level will drop to ambient pressureand the
object will be lost.
Robot controllersupply
(Any24Vpin)
Vacuum Gripperpowered ON.
l If anobject isdetected:thevacuum level will continueto beregulated and theobject will
not be lost.
l If no object isdetected:theVacuum Gripperwill go into astandbystate2secondsafter
thee-Stop buttonispressed.
Warning
Lossof vacuum canoccurdueto powerfailureorairsupplyinterruption.
2.2.Intended Use
TheGripperunit isdesigned forgripping and temporarilysecuring orholding objects.
Caution
TheGripperisNOT intended forapplying forceagainst objectsorsurfaces.
Theproduct isintended forinstallation onarobot orotherautomated machineryand equipment.
16

Info
Alwayscomplywithlocal,state,province and/orfederal laws,regulationand directivesregarding automationsafetyand
general machinesafety.
Theunit should beused exclusivelywithintherange of itstechnical data.Anyotheruse of theproduct isdeemed improperand
unintended.Robotiq will not beliableforanydamagesresulting from anyimproperorunintended use.
17

3.Installation
Thefollowing subsectionswill guideyou through theinstallationand general setup of yourRobotiq Vacuum Gripper.
Warning
Beforeinstalling:
l Read and understand thesafetyinstructionsrelated to the Vacuum Gripper.
l Verifyyourpackageaccording to thescope of deliveryand yourorder.
l Makesureto havetherequired parts,equipment and toolslisted in Scope of delivery.
Warning
When installing:
l Meet therecommended environmental conditions.
l Do not operatetheVacuum Gripper,oreventurnonthepowersupply,beforethedeviceisfirmlyanchored and themachine
area iscleared.Makesurethat theairsupplyissecured.
3.1.Scope of Delivery
3.1.1.RobotiqAirPick VacuumGripperKit
Standard upondelivery:
l Standard Kit
o
One(1)Pneumaticvacuum generator
o
Two (2)standard suctioncups(two different sizes)
o
One(1)End effectorcoupling kit
o
One(1)USBstick
o
One(1)Tubing 8mm -(8m)
o
One(1)USBto RS485signal converter
o
One(1)RS485to RS232Converter
o
One(1)10-meterscommunicationcable
o
Required hardware
AirPick-InstructionManual
18

l 2SuctionCupsKit
o
One(1)Vacuum generator
o
One(1)suctioncup system for2suction cups( 1 manifold,1bracket,tubing,2airnodes,4 suctioncups)
o
Four(4)standard suctioncups(two different sizes)
o
Four(4)port plugs(two alreadymounted onthesuctioncup system)
o
One(1)End effectorcoupling kit
o
10-metercommunication cable
o
One(1)USBto RS485signal converter
o
One(1)RS485to RS232Converter
o
One(1)Tubing 8mm -(8m)
o
Required hardware
l 4SuctionCupsKit
o
One(1)Vacuum generator
o
One(1)suctioncup system for4suction cups(1manifold,1bracket,tubing,4airnodes,8 suctioncups)
o
Eight (8)standard suctioncups(two different sizes)
o
Four(4)port plugs
o
One(1)End effectorcoupling kit
o
10-metercommunication cable
o
One(1)USBto RS485signal converter
o
One(1)RS485to RS232Converter
o
One(1)Tubing 8mm -(8m)
o
Required hardware
3.1.2.UniversalRobotsWrist ConnectionKit forCB-Series
AirPickWrist Connect Kit forURCB-Series/ One (1) cup (VAC-CB-UR-AIRPICK-KIT1-W)
l 1xRobotiq AirPickGripper
l 1xI/O Coupling Kit (IO-CPL-UR-CB-KIT)
l 1xscrewkit to install onthe robot (CPL-SCREW-KIT)
l 1xMicro-USBto USBcable (CBL-MICRO-USB-6FT)
l 1x16GUSBStick(ACC-USB-16G)
l 1xVacuum cup
l 1xTubing 8mm-8m
19

AirPick-InstructionManual
AirPickWrist Connect Kit forURCB-Series/ Two (2) cups(VAC-CB-UR-AIRPICK-KIT2-W)
l 1xRobotiq AirPickGripper
l 1xI/O Coupling Kit (IO-CPL-UR-CB-KIT)
l 1xscrewkit to install onthe robot (CPL-SCREW-KIT)
l 1xMicro-USBto USBcable (CBL-MICRO-USB-6FT)
l 1x16GUSBStick(ACC-USB-16G)
l 1xSuctionSystemfortwo (2)cups
l 1xTubing 8mm-8m
AirPickWrist Connect Kit forURCB-Series/ Four (4) cups(VAC-CB-UR-AIRPICK-KIT4-W)
l 1xRobotiq AirPickGripper
l 1xI/O Coupling Kit (IO-CPL-UR-CB-KIT)
l 1xscrewkit to install onthe robot (CPL-SCREW-KIT)
l 1xMicro-USBto USBcable (CBL-MICRO-USB-6FT)
l 1x16GUSBStick(ACC-USB-16G)
l 1xSuctionSystemforfour(4)cups
l 1xTubing 8mm-8m
Info
Pleasereferto theSpare Parts,Kitsand Accessoriessectionforalist of availablecouplings.
Caution
Thefollowing arenot included inthestandard delivery:
l Optionssuch ascustom suction cup brackets/platesorcouplingsformounting onvariousindustrial robots.
l Hardwarerequired for accessoriesorfixtures,unlessspecified.
Info
When purchased asakit,theAirPickVacuum Gripperwillcomeina packagewiththeappropriatecoupling,suction cupsand
cabling.
Pleasereferto theSpare Parts,Kitsand Accessoriessectionforadditional components.
20
/