2. Hardware
RC700 / RC90 option PG motion system Rev.5 9
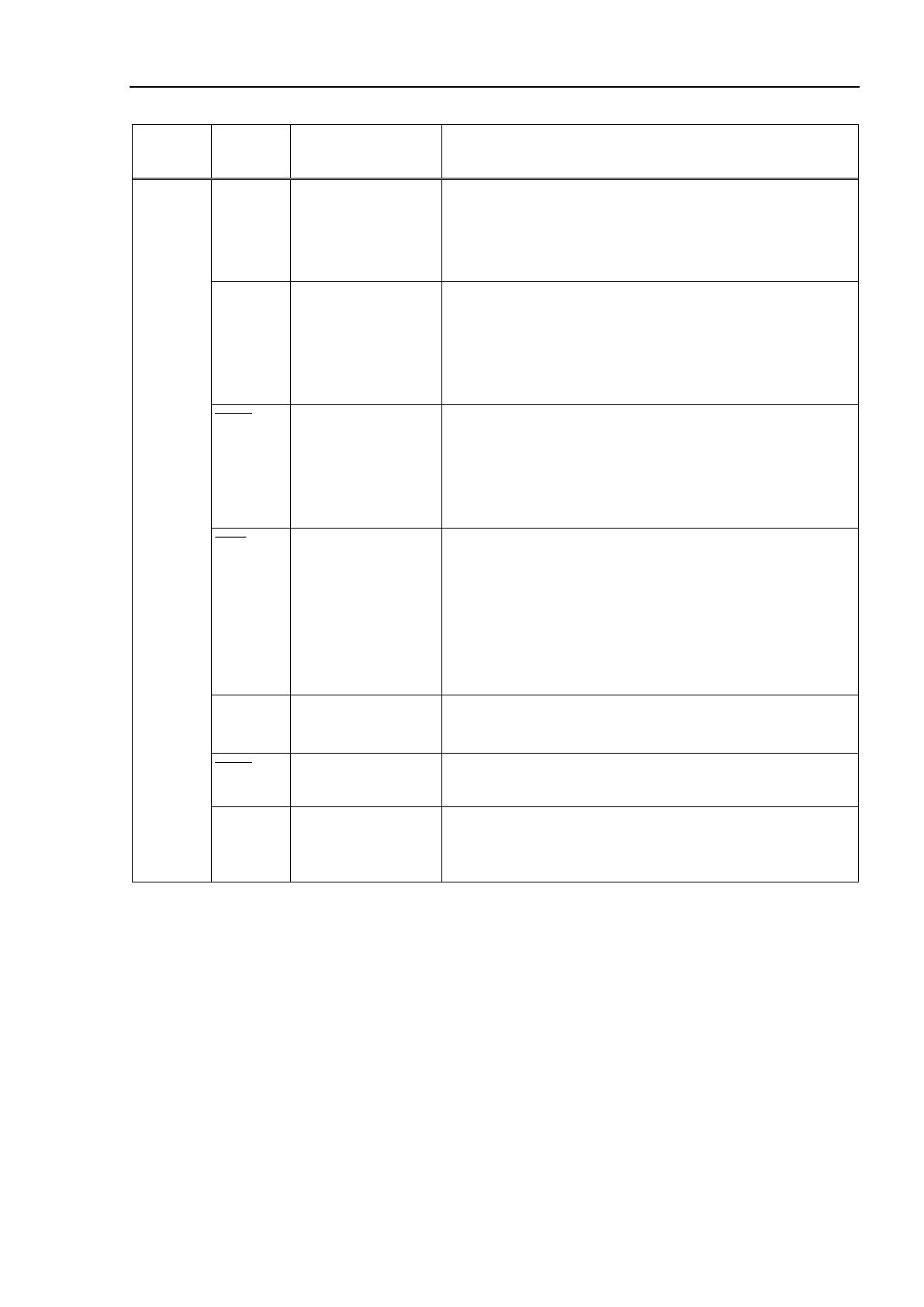
Direction
Signal
Name
Function Description
Input CWLM CW (clockwise) Limit
signal
Connect to normally closed CW Limit switch.
This signal is accepted only when
clockwise (CW) pulses are generated.
When this signal is detected, the pulse generation will be stopped either
gradually or immediately according to the software setting.
CCWLM CCW (counter-
clockwise) Limit signal
Connect to normally closed CCW Limit switch.
This signal is accepted only when counter-clockwise (CCW) pulses are
generated. When this signal is detected, the pulse generation will be
stopped either gradually or immediately according to the software
setting.
NORG Near-to-Origin signal
Connect to either a photo or magnetic normally open sensor to detect the
proximity of the target origin. Ensure that the proximity sensor is
always used with an origin sensor (either ORG or Z-Phase).
If a mechanical switch is used, you may need to connect a capacitor in
parallel with the switch (0.1μf 50V recommended).
ORG Origin signal If the motor encoder Z-Phase signal will not be used, connect either a
photo or magnetic normally open sensor to detect the target origin.
Leave the ZORG terminal unconnected. The accuracy of calibration or
positioning can be increased and the calibration time can be shortened
by using the origin sensor with a proximity sensor (NORG).
If a mechanical switch is used, you may need to connect a capacitor in
parallel with the switch (0.1μf 50V recommended).
+ZORG
-ZORG
Encoder Phase -Z signal Use this terminal if the motor encoder’s Z-Phase is used as an origin
sensor in which case the ORG terminal must be left disconnected.
DEND Detection (calibration)
end signal
Connect to the signal from the drive that indicates that positioning is
complete. Must be left disconnected if a stepper motor is used.
ALM Alarm signal Connect the alarm signal from the drive. Generation of pulses will be
stopped gradually or immediately when this signal is detected. The
alarm logic and the stop mode are defined in the software.
For DEND input, when a servo motor is used, the position complete signal from the drive must be
connected. After a MOVE command is executed, SPEL waits until the DEND input is activated.
When the DEND input is not activated even after waiting for a time specified by a FINE command,
a message "Error 4004: Event waiting error with the Motion Control Module." appears. In case
of this error, it is necessary to exit controller, stop the SPEL Runtime Drivers, then restart controller.
When it is expected that your servo drive does not have an output equivalent to the positioning
completion signal, or that the DEND input is not activated, the DEND input must be connected to
GND. In this case, SPEL does not check that the servo drive's positioning is completed.
Therefore, after the operation command is executed, use the time delay necessary for positioning
to be complete in your application.
NOTE





















