Page is loading ...

Documentation
KL320x
Analog Input Terminals for Pt100 (RTD) or NTC10K
4.4
2019-09-10
Version:
Date:



Table of contents
KL320x4 Version: 4.4
Table of contents
1 Foreword ....................................................................................................................................................7
1.1 Notes on the documenation...............................................................................................................7
1.2 Safety instructions .............................................................................................................................7
1.3 Documentation Issue Status..............................................................................................................9
2 Product overview.....................................................................................................................................11
2.1 Introduction......................................................................................................................................11
2.2 Technical data .................................................................................................................................15
2.3 Basic function principles ..................................................................................................................16
3 Mounting and wiring................................................................................................................................19
3.1 Installation on mounting rails ...........................................................................................................19
3.2 Installation instructions for enhanced mechanical load capacity .....................................................22
3.3 Connection system ..........................................................................................................................22
3.4 Connection and LED description .....................................................................................................26
3.5 ATEX - Special conditions (standard temperature range) ...............................................................29
3.6 ATEX - Special conditions (extended temperature range) ..............................................................30
3.7 ATEX Documentation ......................................................................................................................31
4 KS2000 Configuration software .............................................................................................................32
4.1 KS2000 - Introduction......................................................................................................................32
5 Access from the user program ..............................................................................................................34
5.1 Mapping...........................................................................................................................................34
5.1.1 KL3201 ............................................................................................................................ 34
5.1.2 KL3202 ............................................................................................................................ 35
5.1.3 KL3204, KL3204-0030..................................................................................................... 36
5.2 Terminal configuration .....................................................................................................................38
5.3 Register overview ............................................................................................................................40
5.4 General description of registers.......................................................................................................40
5.4.1 Process variables ............................................................................................................ 41
5.4.2 Type register.................................................................................................................... 41
5.4.3 Manufacturer parameters ................................................................................................ 42
5.4.4 User parameters .............................................................................................................. 42
5.4.5 Extended user area ......................................................................................................... 43
5.5 Terminal-specific register description ..............................................................................................43
5.5.1 Process variables ............................................................................................................ 43
5.5.2 Manufacturer parameters ................................................................................................ 43
5.5.3 User parameters .............................................................................................................. 44
5.5.4 Output format................................................................................................................... 45
5.6 Control and status byte....................................................................................................................46
5.6.1 Control byte for process data exchange .......................................................................... 46
5.6.2 Status byte for process data exchange ........................................................................... 46
5.6.3 Compensation.................................................................................................................. 46
5.6.4 Default setting of the registers ......................................................................................... 47
5.6.5 KL3202 as resistance input 0 to 1 kΩ.............................................................................. 47
5.7 Register communication ..................................................................................................................47

Table of contents
KL320x 5Version: 4.4
5.7.1 Register access via process data exchange ................................................................... 47
5.7.2 Example 1........................................................................................................................ 49
5.7.3 Example 2........................................................................................................................ 49
6 TwinCAT ...................................................................................................................................................50
6.1 Programming ...................................................................................................................................52
6.2 Function block FB_KL320xConfig ...................................................................................................52
7 Appendix ..................................................................................................................................................53
7.1 Support and Service ........................................................................................................................53
List of illustrations...................................................................................................................................54

Table of contents
KL320x6 Version: 4.4

Foreword
KL320x 7Version: 4.4
1 Foreword
1.1 Notes on the documenation
Copyright
© Beckhoff Automation GmbH & Co. KG, Germany.
The reproduction, distribution and utilization of this document as well as the communication of its contents to
others without express authorization are prohibited.
Offenders will be held liable for the payment of damages. All rights reserved in the event of the grant of a
patent, utility model or design.
Disclaimer
The documentation has been prepared with care. The products described are, however, constantly under
development.
We reserve the right to revise and change the documentation at any time and without prior announcement.
No claims for the modification of products that have already been supplied may be made on the basis of the
data, diagrams and descriptions in this documentation.
Patent Pending
The EtherCAT Technology is covered, including but not limited to the following patent applications and
patents: EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702 with corresponding
applications or registrations in various other countries.
Intended audience
This description is only intended for the use of trained specialists in control and automation engineering who
are familiar with the applicable national standards.
It is essential that the documentation and the following notes and explanations are followed when installing
and commissioning these components.
It is the duty of the technical personnel to use the documentation published at the respective time of each
installation and commissioning.
The responsible staff must ensure that the application or use of the products described satisfy all the
requirements for safety, including all the relevant laws, regulations, guidelines and standards.
Trademarks
Beckhoff
®
, TwinCAT
®
, EtherCAT
®
, EtherCATG
®
, EtherCATG10
®
, EtherCATP
®
, SafetyoverEtherCAT
®
,
TwinSAFE
®
, XFC
®
, XTS
®
and XPlanar
®
are registered trademarks of and licensed by Beckhoff Automation
GmbH. Other designations used in this publication may be trademarks whose use by third parties for their
own purposes could violate the rights of the owners.
1.2 Safety instructions
Safety regulations
Please note the following safety instructions and explanations!
Product-specific safety instructions can be found on following pages or in the areas mounting, wiring,
commissioning etc.

Foreword
KL320x8 Version: 4.4
Exclusion of liability
All the components are supplied in particular hardware and software configurations appropriate for the
application. Modifications to hardware or software configurations other than those described in the
documentation are not permitted, and nullify the liability of Beckhoff Automation GmbH & Co. KG.
Personnel qualification
This description is only intended for trained specialists in control, automation and drive engineering who are
familiar with the applicable national standards.
Description of instructions
In this documentation the following instructions are used.
These instructions must be read carefully and followed without fail!
DANGER
Serious risk of injury!
Failure to follow this safety instruction directly endangers the life and health of persons.
WARNING
Risk of injury!
Failure to follow this safety instruction endangers the life and health of persons.
CAUTION
Personal injuries!
Failure to follow this safety instruction can lead to injuries to persons.
NOTE
Damage to environment/equipment or data loss
Failure to follow this instruction can lead to environmental damage, equipment damage or data loss.
Tip or pointer
This symbol indicates information that contributes to better understanding.

Foreword
KL320x 9Version: 4.4
1.3 Documentation Issue Status
Version Comment
4.4 • Update Firmware and hardware versions
• Update chapter “Basic Function Principles”
4.3 • Update Firmware and hardware versions
• Update Technical data
• Chapter "Installation instructions for enhanced mechanical load capacity" added
• Chapter "TwinCAT" including Link to FB_KL320xConfig added
4.2 • KL3204-0030 added
4.1 • Update appendix
4.0 • Migration in ST4
• Update structure
Firmware and hardware versions
Documentation
Version
KL3201
Firmware Hardware
4.4 3G 09
4.3 3G 09
4.0 3G 08
Documentation
Version
KL3202
Firmware Hardware
4.4 3G 09
4.3 3G 09
4.0 3G 08
Documentation
Version
KL3204
Firmware Hardware
4.4 3E 05
4.3 3E 05
4.0 3E 05
Documentation
Version
KL3204-0030
Firmware Hardware
4.4 42 05
4.3 42 05
4.2 42 05
The firmware and hardware versions (delivery state) can be taken from the serial number printed on the side
of the terminal.
Syntax of the serial number
Structure of the serial number: WW YY FF HH
WW - week of production (CW, calendar week)
YY - year of production
FF - firmware version
HH - hardware version
Example with ser. no.: 47 15 1A 00:

Foreword
KL320x10 Version: 4.4
47 - week of production 47
15 - year of production 2015
1A - firmware version 1A
00 - hardware version 00

Product overview
KL320x 11Version: 4.4
2 Product overview
2.1 Introduction
KL3201, KL3202
Fig.1: KL3201

Product overview
KL320x12 Version: 4.4
Fig.2: KL3202
The KL3201 and KL3202 analog input terminals allow resistance sensors to be connected directly. The Bus
Terminal's circuitry can operate the sensors using 2-wire or 3-wire connection techniques.
Linearization over the full temperature range is realized with the aid of a microprocessor. The temperature
range can be selected freely. The Bus Terminal's standard settings are: Resolution 0.1°C in the temperature
range of PT100 sensors in 3-wire connection.
The two Run LEDs indicate data exchange with the Bus Coupler, the error LEDs show sensor faults (e.g.
broken wire).

Product overview
KL320x 13Version: 4.4
KL3204-0000
Fig.3: KL3204-0000
The KL3204-0000 analog input terminal allows resistance sensors to be connected directly. The Bus
Terminal's circuitry can handle sensors using the 2-wire technique.
Linearization over the full temperature range is realized with the aid of a microprocessor. The temperature
range can be selected freely. The Bus Terminal's standard settings are: Resolution 0.1°C over the
temperature range of PT100 sensors.
The error LEDs indicate sensor faults (e.g. a broken wire). The KL3204-0000 combines four channels in a
single housing.

Product overview
KL320x14 Version: 4.4
KL3204-0030
Fig.4: KL3204-0030
The KL3204-0030 analog input terminal enables four NTC resistance sensors to be connected directly. The
Bus Terminal's circuitry can handle sensors using the 2-wire technique. Linearization over the full
temperature range is realised with the aid of a microprocessor. The standard setting of the Bus Terminal is a
resolution of 0.1°C in the temperature range of the NTC 10kΩ sensors. The error LEDs indicate sensor
faults (e.g. a broken wire). The KL3204-0030 combines four channels in a single housing.

Product overview
KL320x 15Version: 4.4
2.2 Technical data
Technical data - KL3201, KL3202, KL3204, KL3204-0030
Technical data KL3201 KL3202 KL3204-0000 KL3204-0030
Number of inputs 1 2 4
Power supply via the K-bus
Sensor types PT100, PT200, PT500, PT1000, Ni100, Ni120, Ni1000
resistance measurement (e.g. potentiometer connection)
NTC (10kΩ)
Connection technology 2 or 3-wire (pre-set to 3-wire) 2-wire
Temperature range -200°C ... +850°C (PT sensors); -60°C ... +250°C (Ni sensors)
Resolution 0.1°C per digit (measuring range 10 to 5000Ω: 0.5°C per digit)
Electrical isolation 500 V (K-bus/signal voltage)
Conversion time ~ 200ms ~ 250ms
Measuring current typically 0.5mA typically
<0.5mA
Measuring error (total
meas. range)
< ± 1°C < ± 1C (at 0°C ... +55°C)
< ± 1.5% (when the extended temperature range is used)
Bit width in process image Input: 1 x 16bit
data
(1 x 8bit Control/
Status optional)
Input: 2 x 16bit data
(2 x 8bit Control/
Status optional)
Input: 4 x 16bit data
(4 x 8bit Control/ Status optional)
Current consumption from
K-bus
typically 60mA
Configuration no address setting, configuration via bus coupler or controller
Special features Wiring fail indication
Weight approx. 70g
Permissible ambient
temperature range
(operation)
0°C ... +55°C -25°C ... +60°C in operation (extended
temperature range)
0°C ... +55°C
Permissible ambient
temperature range
(storage)
-25°C ... +85°C -40°C ... +85°C -25°C ... +85°C
Relative humidity 95%, no condensation
Vibration/ shock resistance conforms to EN 60068-2-6 / EN 60068-2-27,
see also installation instructions for enhanced mechanical
load capacity [}22]
conforms to EN
60068-2-6 / EN
60068-2-27
EMC immunity/ emission conforms to EN 61000-6-2 / EN 61000-6-4
Installation position variable
Protection class IP20
Approvals CE,
cULus,
ATEX [}29]
(standard
temperature
range),
GL
CE,
cULus,
ATEX [}30] (extended temperature
range),
GL
CE

Product overview
KL320x16 Version: 4.4
2.3 Basic function principles
Properties
The KL320x analog input terminals enable resistance sensors to be connected directly. A micro-controller
within the terminal is used for converting and linearizing the resistance to a temperature value. The
temperatures are displayed as follows:
• for KL3201, KL3202, KL3204, KL3204-0030:
◦ Measuring range 10 to 5000 Ω: 1/2 °C (1 digit = 0.5 °C)
◦ Measuring range 10 to 1200 Ω: 1/10 °C (1 digit = 0.1 °C)
◦ All other measuring ranges: 1/10 °C (1 digit = 0.1 °C)
• for KL3204-0030:
◦ Measuring range -40°C to 110°C: 1/10 °C (1 digit = 0.1°C)
◦ Resistor at 0°C: 27 280Ω
Note: since there are different NTC10K types, this value characterizes the characteristic curve
stored in the KL3204-0030.
In addition to this, a broken wire or short circuit is reported to the Bus Coupler or to the controller, and
indicated by the ERROR LED.
PT100, NI100, PT200, PT500, NI120, NI1000 and PT1000 as well as NTC10K of the KL3204-0030 elements
are implemented over their full measuring ranges as resistance sensors. The terminal can be fully configured
over a fieldbus. A self-defined scaling of the output can, for instance, be performed, or the temperature
conversion can be switched off. In the latter case, the measurement is output in the range from 10Ω up to
1.2kΩ with a resolution of 1/16Ω (the internal resolution of the resistance value is 1/255Ω).
Process data output format
In the delivery state, the measured value is displayed in increments of 1/10° C in two's complement format
(integer). The complete measuring range is output for each resistance sensor. Other display types can be
selected via the feature register (e.g. sign/amount representation, Siemens output format).
Measured value Hexadecimal output Signed integer output
-250.0°C 0xF63C -2500
-200.0°C 0xF830 -2000
-100.0°C 0xFC18 -1000
-0.1°C 0xFFFF -1
0.0°C 0x0000 0
0.1°C 0x0001 1
100.0°C 0x03E8 1000
200.0°C 0x07D0 2000
500.0°C 0x1388 5000
850.0°C 0x2134 8500
Resistance limit values
• R > 400 Ω: Bits 1 and 6 (over range and error bits) in the status byte are set.
The linearization of the characteristic curve is continued with the coefficients of the upper range limit up to
the limit stop of the A/D converter (approx. 500 Ω for PT100).
• R<18 Ω: Bits 0 and 6 (under range and error bits) in the status byte are set.
The smallest negative number is displayed (0x8001 corresponds to -32767).
For over range or under range the red error LED is switched on.

Product overview
KL320x 17Version: 4.4
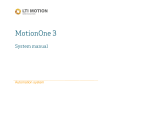
Process data
The process data that are transferred to the terminal bus are calculated using the following equations:
Variable Meaning
X_RL ADC value of the supply cables
X_RTD ADC value of the temperature sensor, including one supply cable
X_R ADC value of the temperature sensor
A_a, B_a Manufacturer gain and offset calibration (R17, R18)
A_h, B_h Manufacturer scaling
A_w, B_w: User scaling
Y_R Temperature sensor resistance value
Y_T measured temperature in 1/16 °C
Y_THS Temperature after manufacturer scaling (1/10 °C)
Y_TAS Temperature after user scaling
Y_AUS Process data to PLC
a) Calculation of the resistance value:
X_R = X_RTD-X_RL (1.0)
Y_R = A_a * (X_R - B_a) (1.1)
b) Curve linearization:
Y_T = a1 * Y_R2 + b1* Y_R + c1 (1.2)
or
Y_T = Y_R if output in Ω (1.3)
c) Neither user nor manufacturer scaling are active:
Y_AUS = Y_T (1.4)
d) Manufacturer scaling active (factory setting):
Y_THS = A_h * Y_T + B_h (1.5)
Y_AUS = Y_THS
e) User scaling active:
Y_TAS = A_w * Y_T + B_w (1.6)
Y_AUS = Y_TAS
f) Manufacturer and user scaling active: (1.7)
Y_1 = A_h * Y_T + B_h
Y_2 = A_w * Y_1 + B_w
Y_AUS = Y_2

Product overview
KL320x18 Version: 4.4
Fig.5: Data flow of the KL320x

Mounting and wiring
KL320x 19Version: 4.4
3 Mounting and wiring
3.1 Installation on mounting rails
WARNING
Risk of electric shock and damage of device!
Bring the bus terminal system into a safe, powered down state before starting installation, disassembly or
wiring of the bus terminals!
Assembly
Fig.6: Attaching on mounting rail
The bus coupler and bus terminals are attached to commercially available 35mm mounting rails (DIN rails
according to EN60715) by applying slight pressure:
1. First attach the fieldbus coupler to the mounting rail.
2. The bus terminals are now attached on the right-hand side of the fieldbus coupler. Join the compo-
nents with tongue and groove and push the terminals against the mounting rail, until the lock clicks
onto the mounting rail.
If the terminals are clipped onto the mounting rail first and then pushed together without tongue and
groove, the connection will not be operational! When correctly assembled, no significant gap should
be visible between the housings.
Fixing of mounting rails
The locking mechanism of the terminals and couplers extends to the profile of the mounting rail. At
the installation, the locking mechanism of the components must not come into conflict with the fixing
bolts of the mounting rail. To mount the mounting rails with a height of 7.5mm under the terminals
and couplers, you should use flat mounting connections (e.g. countersunk screws or blind rivets).

Mounting and wiring
KL320x20 Version: 4.4
Disassembly
Fig.7: Disassembling of terminal
Each terminal is secured by a lock on the mounting rail, which must be released for disassembly:
1. Pull the terminal by its orange-colored lugs approximately 1cm away from the mounting rail. In doing
so for this terminal the mounting rail lock is released automatically and you can pull the terminal out of
the bus terminal block easily without excessive force.
2. Grasp the released terminal with thumb and index finger simultaneous at the upper and lower grooved
housing surfaces and pull the terminal out of the bus terminal block.
Connections within a bus terminal block
The electric connections between the Bus Coupler and the Bus Terminals are automatically realized by
joining the components:
• The six spring contacts of the K-Bus/E-Bus deal with the transfer of the data and the supply of the Bus
Terminal electronics.
• The power contacts deal with the supply for the field electronics and thus represent a supply rail within
the bus terminal block. The power contacts are supplied via terminals on the Bus Coupler (up to 24V)
or for higher voltages via power feed terminals.
Power Contacts
During the design of a bus terminal block, the pin assignment of the individual Bus Terminals must
be taken account of, since some types (e.g. analog Bus Terminals or digital 4-channel Bus Termi-
nals) do not or not fully loop through the power contacts. Power Feed Terminals (KL91xx, KL92xx
or EL91xx, EL92xx) interrupt the power contacts and thus represent the start of a new supply rail.
PE power contact
The power contact labeled PE can be used as a protective earth. For safety reasons this contact mates first
when plugging together, and can ground short-circuit currents of up to 125A.
/