
STE 58764
- -
2-1
CHAPTER 2
INSTALLATION
2.1 INSTALLATION ENVIRONMENT
Table 2.1 shows the environmental conditions for the location in which the SR-HSP Series Robot
and SR7000 Controller are to be installed.
Table 2.1 Environmental Conditions for the Robot and Controller
Item Specifications
In operation :
0 to 40
℃
Temperature
In storage :
-10 to 50
℃
Humidity 20 to 90 % (Non-condensing)
Do not install the robot where it may be subject to fluids such as water.
Altitude 1000 m or less
In operation : Within 0.98m/s
2
Vibration
In transport : Within 9.8m/s
2
Dust There is to be no inductive dust.
Please consult with Toshiba first should you wish to use the robot and
controller in an especially dusty environment.
Gas There is to be no corrosive or combustible gas.
Sunlight The robot must not be subject to direct sunlight.
Electromagnetic
noise
There are to be no devices in the area which produce an excessive
amount of electromechanical noise.
Field There are to be no devices in the area that generate a strong field.
Danger
・
Do not place the robot near combustible matters.
Doing so could lead to fires if the matter ignites due to a fault, etc.
2.2 ROBOT INSTALLATION
Before actually installing the robot, you must plan a layout and take into consideration such
matters as the working space, coordinate system and space for maintenance.
2.2.1 External Dimensions
An outline drawing of the robot is shown in Figs. 2.1 to 2.5.

STE 58764
- -
2-2
Fig. 2.1 External view of SR-504HSP robot

STE 58764
- -
2-3
Fig. 2.2 External view of SR-554HSP robot

STE 58764
- -
2-4
Fig. 2.3 External view of SR-654HSP robot

STE 58764
- -
2-5
Fig. 2.4 External view of SR-854HSP robot

STE 58764
- -
2-6
Fig. 2.5 External view of SR-1054HSP robot

STE 58764
- -
2-7
2.2.2 Working Space
Figs. 2.6 to 2.10 show the working space of the robot. Each axis can operate within the
working space. To keep the robot from moving out of the working space by mis-operation,
the robot is equipped with mechanical stoppers outside the moving range. In addition,
soft limits are provided which may be set as desired by the user.
Fig. 2.6 SR-504HSP robot working space
100 150
R184
R500
110°
137°
137°
110°
R250

STE 58764
- -
2-8
Fig. 2.7 SR-554HSP robot working space
Fig. 2.8 SR-654HSP robot working space
200
115°
115°
120°
R193
R550
120°
100
200
115°
115°
140°
140°
R227
R650
100

STE 58764
- -
2-9
Fig. 2.9 SR-854HSP robot working space
Fig. 2.10 SR-1054HSP working space
200
145°
145°
115°
115°
R350
R850
110
200
115°
115°
145°
145°
R333
R1050
150

STE 58764
- -
2-10
2.2.3 Coordinate System
The robot's joint angle zero point (0° or 0mm position) has been calibrated before
shipment in respect to the base reference planes. The base coordinate system will be
determined according to this calibration. Figs. 2.11 to 2.15 show the base coordinate
system and the zero positions of each axis joint angle.
Fig. 2.11 SR-504HSP base coordinate system and joint angle zero point
250 250
90
180
Axis 1
Axis 2
Axis 4
0° 0°
0°
(+)
(+)
(+)
(-)
(-)
(-)
Reference plane
Axis 3
(+)
0mm
◎
Origin of base
coordinate system
100
X
B
Z
B
Y
B
Reference plane

STE 58764
- -
2-11
Fig. 2.12 SR-554HSP base coordinate system and joint angle zero point
105
210
250
300
Axis 1
Axis 2
Axis 4
(+)
(+)
(+)
(-)
(-)
(-)
Reference plane
View A
View A
Axis 3
(+)
Origin of base
coordinate system
◎
100
0mm
X
B
X
B
Y
B
Z
B
Reference plane

STE 58764
- -
2-12
Fig. 2.13 SR-654HSP base coordinate system and joint angle zero point
105
300
210
350
100
◎
Origin of base
coordinate system
(+)
0mm
View A
Reference plane
(-)
(-)
(-)
(+)
(+)
(+)
Axis 4
Axis 2
Axis 1
0°
0°0°
View A
X
B
X
B
Y
B
Z
B
Reference plane
Axis 3

STE 58764
- -
2-13
Fig. 2.14 SR-854HSP base coordinate system and joint angle zero point
105
550300
210
Y
B
Reference plane
Reference plane
X
B
(-)
(-)
(-)
(+)
(+)
(+)
Axis 1
Axis 2
Axis 4
0° 0°
0°
110
View A
Z
B
(+)
0mm
◎
Origin of base
coordinate system
View A
X
B
Axis 3

STE 58764
- -
2-14
Fig. 2.15 SR-1054HSP base coordinate system and joint angle zero point
View A
X
B
View A
(+)
0mm
150
◎
Origin of base
coordinate system
Z
B
B
150
300
580470
Reference plane
Reference plane
(-)
(-)
(-)
(+)
(+)
(+)
0° 0°
0°
Axis 1
Axis 2
Axis 4
X
B
Y
Axis 3

STE 58764
- -
2-15
2.2.4 Installing the Robot
The robot is fastened down using the mounting holes in the base.
Use M12 hexagon socket bolts for the SR-504HSP and M16 hexagon socket bolts for the
SR-554HSP, SR-654HSP, SR-854HSP and SR-1054HSP.
The robot installation method is shown in Figs. 2.16 to 2.18. A reference plane is
prepared on the base section and is marked with "xxx".
To align the robot's base coordinate system position or when the robot must be replaced,
prepare an adequate reference plane. Then, contact that reference plane to the base
reference plane and fasten. The reference plane has been coated with anticorrosive
agents before shipment, so wipe the agent off with thinner before using.
Caution
・
The robot will suddenly accelerate and decelerate during operation, so when installing it on
a frame, make sure that the frame has sufficient strength and rigidity.
If the robot is installed on a frame that does not have sufficient rigidity, the vibration will
occur while the robot is operating, and could lead to faults.
When installing the robot on the floor, fasten the robot down securely with foundation bolts.
・
Install the robot on a level place.
Failure to do so could lead to a drop in performance or faults.
Fig. 2.16 Installing the SR-504HSP robot
30
20
M12 hexagon
socket bolt
4-φ14hole
90 140
130
65
130
180
φ24depth counterbore
Reference plane
Reference plane
××
×
×
××

STE 58764
- -
2-16
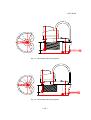
Fig. 2.17 Installing the SR-554HSP,SR-654HSP, SR-854HSP robot
Fig. 2.18 Installing the SR-1054HSP robot
40
25
M16 hexagon
socket bolt
4-φ18 hole,counterbore 26
160
160
160
105
104
105105
Reference plane
Reference plane
×××
×
×
××
40
25
M16 hexagon
socket bolt
4-φ18 hole,counterbore 26
240
148150
240
185
150 150
Reference plane
××××
×
×
×××
×
×
Reference plane

STE 58764
- -
2-17
2.3 INSTALLING THE CONTROLLER
2.3.1 External Dimensions
An external view of the controller is shown in Fig 2.19.
Top
Right side
Front
Rear
Fig. 2.19 External view of the controller
381
330
30.5 20.5
430
241
230
11

STE 58764
- -
2-18
2.3.2 Rack Mounting Dimensions
When mounting the SR-7000 robot controller in a rack, set the side brackets using the
screw holes provided on both ends of the front panel, and secure the controller to the rack.
(
①
in Fig. 2.20: Side brackets are optional.)
Fig. 2.20 Dimensions of controller rack mounting holes
2.3.3 Precautions for Rack Mounting
Pay attention to the following when rack mounting the SR-7000 robot controller.
(1) When mounting the controller in a rack, use the screw holes provided at both ends of
the front panel, and fix the controller. (Optional side brackets are required.)
Caution
・
If the rack is completely sealed, provide holes to allow the air to be let out, forcibly ventilate
the rack with a fan or cool it indirectly so that the heat will not be trapped in the rack.
If the heat is trapped in the rack or controller, faults could occur.
(2) The cable connectors are connected to the rear side of the controller, so provide a
space of 110mm at the rear side.
460 1010
Adaptive screw
diameter 5mm
4040 150
11
①
①
4-R3

STE 58764
- -
2-19
(3) The upper cover must be removed during maintenance. (See Fig. 2.21.)
Keep this in mind when installing the controller. Specifically, the controller should be
easily removable from the rack. Practically, be careful of the following points.
(a) Arrange the cables around the rear panel of the controller (so that the controller
can be removed).
(b) Arrange the cables between the controller and the control panel when the control
panel is separated (so that the controller can be removed).
(c) Connect all the cables in a position where the robot can be operated even if the
controller is removed from the rack.
Fig. 2.21 Upper cover
(4) When the controller is mounted on the rack, the weight of the controller should be
supported with the legs of the controller. Screw holes for rack mounting the
controller are used for securing the controller panel, and the weight of the controller
cannot be supported only with the screws.
(5) On the front of the controller, a clearance of approx. 90 mm should be provided for
connecting the connector of the teach pendant. Even if the teach pendant is not
used, a clearance of approx. 50 mm is required for connecting a dummy plug.
Fig. 2.22 Clearance of front panel of controller
S
R
7
0
0
0
R
o
b
o
t
C
o
n
t
r
o
l
l
e
r
Upper cover
50mm
35mm
90mm

STE 58764
- -
2-20
2.3.4 Precautions for Direct Installation
When two or more controllers are used, it is necessary to provide a clearance of 50 mm or
more in the horizontal direction and a clearance of 100 mm or more in the vertical
direction between the controllers.
Caution
・
Provide a ventilation space at the side of the controller so that the air vent holes are not
blocked. The space equal to the length of the support should be kept below the lower
surface.
Failure to do so could cause the cooling performance to drop or to faults.
・
Do not stack the controllers or place objects in front of it.
Fig. 2.23 Controller ventilation space
2.4 PRECAUTIONS FOR HANDLING THE TEACH PENDANT
Be careful of the following when handling the teach pendant.
Caution
・
Do not drop the teach pendant or hit it against anything.
・
Do not pull on the cable protruding from the teach pendant.
・
Do not press the switches on the teach pendant with anything sharp (like the tip of a knife,
pencil, ball-point pen, etc.).
・
Do not place or use the teach pendant near open flames.
・
Do not leave the teach pendant in direct sunlight for a long period of time.
ONOFF
STARTSTOP
CYCLE STOP
MANU
INT
EXT
FAULT
POWER
SERVO POWER EMERGENCY
BATTERY
ALARM
J1
J2
PC
FDD
TP
C.P.
CC24V
10AT
POWER
50mm or more 50mm or more
11mm
Page is loading ...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21





















Ask a question and I''ll find the answer in the document
Finding information in a document is now easier with AI
Related papers
Other documents
-
 Rasurbo SC-08 Datasheet
Rasurbo SC-08 Datasheet
-
adept technology 300CR User manual
-
YASKAWA Motoman DX200 User manual
-
Miller RPT-2-500 POSITIONER Owner's manual
-
 Hiwin SCARA Robot RS405-LU User manual
Hiwin SCARA Robot RS405-LU User manual
-
Epson RS3 SCARA Robots User manual
-
Epson Flexion N6-850 Compact 6-Axis Robots Installation guide
-
Mitsubishi Electric RV-5AS-D Standard Owner's manual
-
-
Kawasaki MPPCCONTO11E-2 Reference guide

