Miller RPT-1-500 POSITIONER Owner's manual
- Category
- Welding System
- Type
- Owner's manual
This manual is also suitable for

Miller
October
1994
Form:
OM-156306A
Effective
With
Serial
No.
KE555371
OWNERS
MANUAL
RPT-1
-500,
RPT-2-500,
And
RPT-2-1
000
Positioner
Read
and
follow
these
instructions
and
all
U
Give
this
manual
to
the
operator.
safety
blocks
carefully.
Have
only
trained
and
qualified
persons
install,
operate,
or
service
this
unit.
Call
your
distributor
if
you
do
not
understand
the
directions.
11113
U
For
help,
call
your
distributor
or:
MILLER
Electric
Mfg.
Co.,
P.O.
Box
1079,
Appleton,
WI
54912
414-734-9821
1
Axis
And
2
Axes
Positioners
For
Robotic
Welding
Systems
Requires
C2
Robot
Control
Equipped
With
External
Axis
Kit
For
Positioning
Of
Fixtures
And
Parts
Within
The
Work
Envelope
Motion
Range
Set
By
Soft
Limit,
Limit
Switches,
And
Mechanical
Stops
Sequential
Or
Cooperative
Operation
Capability
cover
5/94
Ref.
ST-800 574
'
1994
MILLER
Electric
Mfg.
Co.
PRINTED
IN
USA


I
ta.
I..
MILLERS
TRUE
BLUEfi
LIMITED
WARRANTY
Effective
February
7,
1996
(Equipment
with
a
serial
number
preface
of
KD
or
newer)
This
limited
werrenty
supersedes
elI
previous
MILLER
wsrrenties
end
is
exclusive
with
no
other
guerentees
or
werrenties
expressed
or
implied.
LIMITED
WARRANTY
Subject
to
theterms
snd
conditions
below,
MILLER
Electric
Mtg.
Co.,
Appleton,
Wisconsin,
werrents
to
its
originet
reteil
purcheser
Ihet
new
MILLER
equipment
sold
efter
the
effective
dete
of
this
limited
werrenty
is
free
of
de
fects
in
meteriet
end
workmenship
xl
the
time
it
is
shipped
by
MILLER.
THIS
WAR
RANTY
IS
EXPRESSLY
IN
LIEU
OF
ALL
OTHER
WARRANTIES,
EXPRESS
OR
IMPLIED,
INCLUDING
THE
WARRANTIES
OF
MERCHANTABIUTY
AND
FIT
NESS.
Within
the
wsrrenty
periods
listed
below,
MILLER
will
repeir
or
replece
eny
wer
rented
perls
or
components
thel
Isil
due
to
such
defects
In
meterisi
or
workmenship.
MILLER
must
be
notified
in
writing
within
thirty
(30)
deys
of
such
defect
or
fellure,
et
which
time
MILLER
will
provide
instructions
on
the
werrenty
cleim
procedures
to
be
followed.
MILLER
shell
honor
werrenty
cleims
on
werrented
equipment
listed
below
in
the
event
ol
such
e
feilure
within
the
werrenty
time
periods.
All
werrenty
time
periods
stert
on
the
dete
thet
the
equipment
wee
delivered
to
the
originel
reteil
purcheser,
or
one
yeer
efter
the
equipment
is
sent
to
e
North
Americen
distributor
or
eighteen
months
effer
the
equipment
is
sent
to
en
Intemelionel
distributor.
1.
5
Yeers
Pens
3
Yeere
Lebor
*
Originel
mein
power
rectifiers
Invenere
(Input
end
output
rectifiers
only)
2.
3
Yeers
Pens
end
Labor
Trensformer/Rectifier
Power
Sources
Plesme
Arc
Culling
Power
Sources
*
Semi-Autometic
end
Automef
ic
Wire
Feeders
Invener
Power
Supplies
Intellitig
*
Robots
(1
yeer
lebor)
3.
2
Yeers
Pens
end
Lebor
*
Engine
Driven
Welding
Generetors
(NOTE:
Engines
ere
werrented
seperelely
by
the
engine
menufecturer.)
Air
Compressors
4.
1
Yeer
Pens
end
Lebor
*
Motor
Driven
Guns
Process
Controllers
IHPS
Power
Sources
*
Weter
Coolent
Systems
HF
Units
5.
6
Months
Belleries
6.
90
Deys
Pens
end
Lebor
MIG
Gune/TIG
Torches
*
APT,
ZIPCUT
&
PLAZCUT
Model
Ptesme
Cutting
Torches
Remote
Controls
Accessory
Kite
Replecement
Pens
MILLERS
True
Blues
Limited
Werrenty
shell
not
epply
to:
1.
Items
fumixhed
by
MILLER,
but
menufectured
by
others,
such
ee
engines
or
trede
ecceesoriee.
These
items
ere
covered
by
the
menufecturere
werrenty,
If
eny.
2.
Consumeble
components:
such
es
confect
tips,
cutting
nozzles,
contectors
end
releyx
or
pens
thet
fell
due
to
normel
weer.
3.
Equipment
thet
hex
been
modified
by
eny
peny
other
then
MILLER.
or
equip
ment
thet
hex
been
improperly
inetelled,
improperly
opereted
or
misused
besed
upon
industry
stenderds,
or
equlpmenf
which
hex
not
hed
reexoneble
end
necexeery
meintenence,
or
equipment
which
hex
been
used
for
operetlon
outside
of
the
epecificetlone
for
the
equipment.
MILLER
PRODUCTS
ARE
INTENDED
FOR
PURCHASE
AND
USE
BY
COMMER
CIALJ1NDUSTRIAL
USERS
AND
PERSONS
TRAINED
AND
EXPERIENCED
IN
THE
USE
AND
MAINTENANCE
OF
WELDING
EQUIPMENT.
In
the
event
of
e
werrenty
cleim
covered
by
this
werrenty.
the
exclusive
remedies
shell
be,
xl
MILLERS
option:
(1)
repeir:
or
(2)
replecement:
or,
where
euthorized
In
writing
by
MILLER
in
eppropriete
cesee,
(3)
the
reeeoneble
cost
of
repeir
or
replece
ment
xl
en
euthorized
MILLER
service
sletion:
or
(4)
peyment
of
or
credit
for
the
pur
chese
price
(less
reexoneble
deprecletlon
bexed
upon
ectuel
use)
upon
return
of
the
goods
xl
customers
risk
end
expense.
MILLERS
option
of
repeir
or
replecement
wilt
be
FOB.,
Fectory
xl
Appleton,
Wisconsin,
or
FOB.
et
e
MILLER
euthorized
ser
vice
fecility
xx
determined
by
MILLER.
Therefore
no
compeneetion
or
reimburse
ment
for
trensponetion
costs
of
eny
kind
will
be
showed.
TO
THE
EXTENT
PERMIITED
BY
LAW,
THE REMEDIES
PROVIDED
HEREIN
ARE
THE
SOLE
AND
EXCLUSIVE
REMEDIES.
IN
NO
EVENT
SHALL
MILLER
BE
LIABLE
FOR
DIRECT,
INDIRECT,
SPECIAL,
INCIDENTAL
OR
CONSEQUENTIAL
DAMAGES
(INCLUDING
LOSS
OF
PROFIT),
WHETHER
BASED
ON
CON
TRACt
TORT
OR
ANY
OTHER
LEGAL
THEORY.
ANY
EXPRESS
WARRANTY
NOT
PROVIDED
HEREIN
AND
ANY
IMPLIED
WAR
RANTY,
GUARANTY
OR
REPRESENTATION
AS
TO
PERFORMANCE,
AND ANY
REMEDY
FOR
BREACH
OF
CONTRACT
TORT
OR
ANY
OTHER
LEGAL
THEORY
WHICH,
BUT FOR
THIS
PROVISION,
MIGHT
ARISE
BY
IMPLICATION,
OPERATION
OF
LAW,
CUSTOM
OF
TRADE
OR
COURSE
OF
DEALING,
IN
CLUDING
ANY
IMPLIED
WARRANTY
OF
MERCHANTABILITY
OR
FITNESS
FOR
PARTICULAR
PURPOSE,
WITH
RESPECT
TO
ANY
AND
ALL
EQUIPMENT
FURNISHED
BY
MILLER
IS
EXCLUDED
AND
DISCLAIMED
BY
MILLER.
Some
xtetes
In
the
U.S.A.
do
not
ellow
IlmlIeIlone
of
how
long
en
Implied
werrenly
lests,
or
the
exclusion
of
incidenlel,
indirect,
epeciel
or
coneequentlel
demegee,
eo
the
ebove
limitetion
or
exclusion
mey
not
epply
to
you.
This
werrenty
provides
spe
cific
legel
rights,
end
other
rights
mey
be
eveilebte,
but
mey
very
from
stete
to
xtete.
In
Cenede,
legieletion
in
some
provinces
providee
for
cenein
edditionel
werrenlies
or
remedies
other
then
xx
sleted
herein,
end
to
the
exfent
thet
they
mey
not
be
weived,
the
limitetions
end
exclusions
set
out
ebove
mey
not
epply.
This
Limited
Werrenly
providee
specific
legel
rights,
end
other
rights
mey
be
evelleble,
but
mey
very
from
province
to
province.
WHO
DO
I
CONTACT?
For
help,
U
contact
your
distributor
For
additional
information,
such
as
Technical
Manuals
(Service
And
Parts)
Engine
Manuals
Circuit
And
Wiring
Diagrams
Process
Handbooks
To
file
a
claim
for
loss
or
damage
during
shipment,
U
contact
the
delivering
carrier
For
assistance
in
filing
or
settling
claims,
contact
your
distributor
and/or
equipment
manufacturers
Transportation
Department
~Tj
Miller
Electric
Mfg.
Co.
CALL:
414-735-4505
FAX:
800-637-2348
(in
USA),
or
414-735-4136
(outside
USA)
Users
Guides
Distributor
Directories
contact
your
distributor
=
a
I I
.
WRITE:
Miller
Electric
Mfg.
Co.
P0,
BOX
1079
Appleton,
WI
54912
USA
Always
provide
Model
Name
and
Serial
or
Style
Number
J
.1
-
Grids
-
spot
Welders
Loed
Benke
-
5DX
Treneformers
Miller
Cyclometic
Equipment
Running
Geer/Treilers
-
Pleeme
Cutting
Torchee
(except
APT,
ZIPCUT
&
PLAZCIJT
Models)
Tecumseh
Engines
Deutz
Engines
(outside
Nonh
Americe)
-
Field
Options
(NOTE:
Field
options
ere
covered
under
True
Blues
for
the
remeining
werrenty
period
of
the
product
they
ere
Inetelled
In,
or
for
e
minimum
of
one
yeer
whichever
is
greeter.)
1=
I
mIhler_werl
3196


SAFETY
GUIDELINES
A.
ROBOTIC
SAFETY
Read,
understand,
and
comply
with
all
safety
rules
at
the
beginning
of
robot
Owners
Manual
Section
1
Safety
in
addition
to
the
following
before
beginning
robotic
procedures
or
operations.
1.
KEEP
OUT
of
robot
work
envelope
when
main
power
is
on.
2.
STAY
ALERT
when
near
robot.
3.
KEEP
INFORMED
about
status
of
robot
and
general
working
conditions.
4.
HAVE
AN
EMERGENCY
STOP
BUTTON
IN
HAND
whenever
you
are
near
the
robot.
5.
UNDERSTAND
AND
BE
FAMILIAR
WITH
ROBOTIC
MOVEMENTS.
Robots
are
unique
industrial
de
vices
and
can
present
unexpected
hazards
to
personnel
because
of
their
movements.
6.
UNPREDICTABLE
ROBOT
MOTION
can
occur
in
even
the
best
designed
areas
of
operation.
7.
NEVER
stand
with
your
back
toward
the
robot.
8.
NEVER
place
yourself
between
robot
work
stations
if
more
than
one
work
station
is
used.
9.
THOROUGHLY
TRAIN
ALL
PERSONNEL
in
robot
operation
and
safety.
10.
TEST
AND
VERIFY
that
ALL
safety
devices
and
components
used
in
the
robotic
cell
are
working
properly.
11.
TURN
OFF
robot
and
welding
power
source
input
power
before
entering
work
envelope.
12.
Provide
proper
Electrostatic
Discharge
(ESD)
protection
for
circuit
boards
in
Robot
Control
and
Teach
Pendant.
B.
WELDING
SAFETY
Read,
understand,
and
comply
with
all
safety
rules
at
beginning
of
welding
power
source
manual
in
addition
to
the
following
before
beginning
arc
welding
operations.
1.
Prevent
electric
shock.
2.
Provide
proper
protection
from
fumes
and
gases.
3.
Protect
eyes
and
skin
from
arc
rays;
protect
ears
from
noise.
4.
Prevent
fire
and
burns
caused
by
hot
metal,
spatter,
slag,
and
arc
sparks.
5.
Protect
compressed
gas
cylinders
from
excessive
heat,
mechanical
shocks,
and
electric
arcs.
6.
Provide
impact
protection
to
all
persons
in
the
cell.
7.
Since
magnetic
fields
from
high
currents
can
affect
pacemaker
operation,
have
wearers
consult
their
doc
tor
before
going
near
arc
welding
operations.
8.
Turn
off
robot
and
welding
power
source
input
power
before
entering
work
envelope
or
working
on
weld
ing
power
source.




TABLE
OF
CONTENTS
SECTION
1
SAFETY
INFORMATION
.
1
SECTION
2
SPECIFICATIONS
1
2-1.
Load
Moment
Charts
3
2-2.
Calculating
Load
Moment
4
2-3.
Weld
Current
Capacity
5
SECTION
3INSTALLATION
6
3-1.
Selecting
A
Location
And
Moving
Positioner
6
3-2.
Positioner
Connections
12
3-3.
Absolute
Offset
Adjustment
Of
Positioner
Axes
13
3-4.
Setting
Soft
Limit
Range
27
SECTION
4-
OPERATION
31
4-1.
Positioner
Components
31
4-2.
Method
Of
Entering
Simultaneous
Or
Cooperative
Motion
Data
32
4-3.
Teaching
Simultaneous
Motion
Data
36
4-4.
Teaching
Cooperative
Motion
Data
63
SECTION
5-
MAINTENANCE
&
TROUBLESHOOTING
78
5-1.
Routine
Maintenance
78
5-2.
Overrun
Protection
79
5-3.
Positioner
Lubrication
79
5-4.
Carbon
Tip
Inspection
80
SECTION
6
ERROR
CODES
81
6-1.
Error
Codes
Information
81
SECTION
7-
ELECTRICAL
DIAGRAMS
90
SECTION
8-
PARTS
LIST
93
Figure
8-1.
Table
Assembly
And
Stand
94
Figure
8-2.
Drive
Unit
96
Figure
8-3.
Air
Outlet
Shaft
Assembly
97
Figure
8-4.
Component
Layout,
Label
Location
97
Figure
8-5.
Frame
Assembly
98
Figure
8-6.
Air
Outlet
Shaft
Assembly
101
Figure
8-7.
Connecting
Shaft
102
Figure
8-8.
Component
Layout,
Label
Location
103
Figure
8-9.
Reduction
Gear
Unit
104
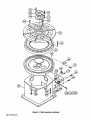
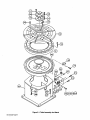
Figure
8-10.
Main
Assembly
106
OM-156
306A
10194




SECTION
1
-
SAFETY
INFORMATION
modl.1
2/93
6
AA
WARNING
AA
CAUTION
Read
all
safety
messages
throughout
this
manual.
Obey
all
safety
messages
to
avoid
injury.
Leam
the
meaning
of
WARNING
and
CAUTION.
1
2
~
tIiI~
:1~II~eU
3
Do
not
touch
live
electrical
parts.
L
ELECTRIC
SHOCK
can
kill
Disconnect
input
power
betoreJj_
4
installing
or
servicing.
5
2
\
~
Keep
away
from
moving
parts.
I
MOVING
PARTS
can
injure.
I
S
Keep
all
panels
and
covers
closed
I
when
operating.
I
1
Safety
Alert
Symbol
2
Signal
Word
WARNING
means
possible
death
or
serious
injury
can
happen.
CAUTION
means
possible
minor
happen.
injury
or
equipment
damage
can
3
Statement
Of
Hazard
And
Result
4
Safety
Instructions
To
Avoid
Hazard
5
Hazard
Symbol
(If
Available)
6
Safety
Banner
Read
safety
blocks
for
each
sym
bol
shown.
7
NOTE
Special
instructions
for
best
oper
ation
not
related
to
safety.
~EAD
SAFETY
BLOCKS
at start
of
I
3ection
3-1
before
proceeding.
7H
NOTE
~
Turn
Off
switch
wh
en
using
high
frequency.
Figure
1-1.
Safety
Information
SECTION
2-
SPECIFICATIONS
Table
2-1.
Positioners
Specification
Description
Maximum
Load
RPT-1
-500
And
RPT-2-500:
1102
lb
(500
kg);
RPT-2-1
000:
2205
lb
(1000kg)
Rotating
Speed
RPT-1-500
And
RPT-2-500:
8rpm
(48/sec);
RPT-2-1000:
2
rpm
(12/sec)
Rotation
Load
Moment
RPT-2-500:
17350
lb
ft2/s2
(735
Nm
75
kgfm]);
RPT-2-1
000:
69384
lb
ft2Is2
(2940
Nm
300
kgfm])
Tilting
Speed
RPT-2-500:
4
rpm
(24Isec);
RPT-2-1000:
1
rpm
(6/sec)
Tilt
Load
Moment
RPT-2-500:
33560
lb
ft2/s2
(1421
Nm
145
kgfm]);
RPT-2-1000:
101606
lb
ft2/s2
(4312
Nm
440
kgf.m])
Rotating
Repeatability
–0.008
in
(–0.2
mm)
At
19.7
in
(500
mm)
From
Center
Tilting
Repeatability
–0.008
in
(–0.2
mm)
At
19.7
in
(500
mm)
From
Center
(RPT-2-500
And
RPT-2-1000)
Center
Of
Gravity
Eccentric
RPT-2-500:
5.9
in
(150
mm);
RPT-2-1
000:
11.8
in
(300
mm)
Center
Of
Gravity
Height
RPT-2-500:
5.9
in
(150
mm);
RPT-2-1000:
11.8
in
(300
mm)
Maximum
Tilting
AngIe
135
(RpT-2-soo
And
RPT-2-1000)
Maximum
Rotation
–10
Tums
(3600)
Rotating
Motor
850
W
AC
Servomotor
Tilting
Motor
850
W
AC
Servomotor
OM-156
306
Page
1


Specification
Description
Stop
Position
Tilting
Or
Rotating
Any
Position
Position
Detection
Encoder
Welding
Power
Rating
500
Amperes
At
60%
Duty
Cycle
Ambient
Temperature
And
Humidity
32
To
122
F
(0
To
50
C);
20%
To
80%
RH
(Without
Condensation)
Overall
Dimensions
See
Figure
3-3,
Figure
3-4,
Or
Figure
3-5
Weight
RPT
-1-500:
573
lb
(260
kg);
RPT-2-500:
882
lb
(400
kg);
RPT-2-1000:
1874
lb
(850
kg)
*
Units
in
gravitational
system.
OM-156
306
Page
2


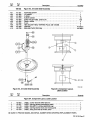
2-1.
Load
Moment
Charts
.3
The
load
moment
charts
show
the
weight
and
location
of
a
load
on
the
positioners.
1
Eccentricity
Of
Height
Center
Of
Gravity
2
Eccentricity
Of
Radius
Center
Of
Gravity
3
Gravitational
Force
Height
Of
The
Center
Of
Gravity
And Mass
Of
Maximum
Load
5.9
in
(150
mm)l
1102
lb
(500
kg)
7.9
in
(200
mm)
939
lb
(426
kg)
9.8
in
(250
mm)
818
lb
(371
kg)
11.8
in
(300
mm)
725
lb
(329
kg)
13.8
in
(350
mm)
650
lb
(295
kg)
15.7
in
(400
mm)
591
lb
(268
kg)
Eccentricity
Of
Radius
Of
The
Center
Of
Gravity
And
Mass
Of
Maximum
Load
Height
Of
The
Center
Of
Gravity
And Mass
Of
Maximum
Load
1515
lb
(687
kg)
1310
lb
(594
kg)
1153
lb
(523
kg)
1032
lb
(468
kg)
Eccentricity
Of
Radius
Of
The
Center
Of
Gravity
And Mass
Of
Maximum
Load
Ref.
ST-800
565
Figure
2-1.
Load
Moment
Charts
RPT-2-500
Model
1102
lb
(500
kg)
661
lb
(300
kg)
551
lb
(250
kg)
472
lb
(214
kg)
412
lb
(187
kg)
RPT-2-1
000
Model
2205
lb
(1000
kg)
1653
lb
(750
kg)
1323
lb
(600
kg)
1102
lb
(500
kg)
944
lb
(428
kg)
827
lb
(375
kg)
OM-156
306
Page
3


2-2.
Calculating
Load
Moment
N
OlE
LI~i~
The
load
moment
of
each
axis
must
be
within
the
limit
of
the
mass
forthe
maximum
load.
The
equation
for
calculating
the
load
moment
is
as
follows:
(Load
moment
1)
=
(Mass
of
load)
x
(Gravitational
acceleration)
x
(Center
of
gravity
eccentricity)
Any
external
load
applied
to
the
original
load
must
be
calculated
for
each
axis
as
follows:
(Load
moment
2)
=
(External
force)
x
(External
force
eccentricity)
Total
axis
load
moment
=
Load
moment
1
+
Load
moment
2
For
example,
calculate
the
load
moment
for
the
RPT-2-500
using
the
conditions
as
follows:
Mass
of
load
=
661.4
lb
(300
kg)
Eccentricity
of
height
center
of
gravity
7.9
in
(200mm)
Eccentricity
of
radius
center
of
gravity
=
3.9
in
(100
mm)
No
external
force
NOTE
~
When
calculating
Axisi
load
moment,
(0.46
ft
0.14
mJ)
must
be
added
in
for
the
table
surface
height
of
5.5
in
(140
mm)
the
eccentricity
of
height
center
of
gravity.
Axis
1
load
moment
Ml
=
661.4
lb
x
32
ft/s2
x
(.328
ft
+
0.46
ft)
(300
kg
x
9.8
rn/s2
x
0.14
m
+
0.2
ml)
Ml
=
16678
lb
ft2/s2
(999.6
N.
m)
This
value
is
less
than
the
33560
lb
ft2/s2
(1421
N
m)
load
moment
limit
for
Axis
1.
Axis
2
load
moment
Ml
=
661.4
lb
x
32
ft/s2
x
.328
ft
(300
kg
x
9.8
m/s2
x
0.1)
Ml
=
6942
lb
ft2/s2
(294
N.
m)
This
value
is
less
than
the
17350
lb
ft2/s2
(735
N
.
m)
load
moment
limit
for
Axis
2.
1
Eccentricity
Of
Radius
Center
Of
Gravity
2
Eccentricity
Of
Height
Center
Of
Gravity
3
Height
Of
External
Force
Contact
Point
4
Eccentricity
Of
Height
For
Contact
Point
Of
External
Force
ST-800
566
2
Figure
2-2.
Example
Of
External
Force
Applied
To
Load
OM-156
306
Page
4

Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
























































































































































































































































Miller RPT-1-500 POSITIONER Owner's manual
- Category
- Welding System
- Type
- Owner's manual
- This manual is also suitable for
Ask a question and I''ll find the answer in the document
Finding information in a document is now easier with AI
Related papers
-
Miller BIG BLUE 600DX Owner's manual
-
-
-
Miller GA-16C1 Owner's manual
-
-
-
-
-
-
Other documents
-
Beats Pill+ Hard reset manual
-
ESAB Installing Controller Board Assembly Installation guide
-
Hyundai HI4 User manual
-
Kawasaki E Series Operating instructions
-
 Techman Robot TM5 Series Manual Book
Techman Robot TM5 Series Manual Book
-
Zebra HC1 User guide
-
 CKD KBX-60(Straight) User manual
CKD KBX-60(Straight) User manual
-
YASKAWA Motoman DX200 User manual
-
-
Toshiba SR-554HSP User manual

