Freescale Semiconductor
MPC5602DRM
Rev 4.2, 12/2013
© Freescale Semiconductor, Inc., 2012-2013. All rights reserved.
MPC5602D Microcontroller
Reference Manual
This is the MPC5602D Reference Manual set, consisting of the following files:
• MPC5602D Reference Manual Addendum (MPC5602DRMAD), Rev. 2
• MPC5602D Reference Manual (MPC5602DRM), Rev. 4.1

Freescale Semiconductor
Reference Manual Addendum
MPC5602DRMAD
Rev. 2, 12/2013
Table of Contents
© Freescale Semiconductor, Inc., 2012-2013. All rights reserved.
This addendum document describes corrections to the
MPC5602D Microcontroller Reference Manual, order
number MPC5602DRM. For convenience, the addenda
items are grouped by revision. Please check our website
at http://www.freescale.com/powerarchitecture for the
latest updates.
The current version available of the MPC5602D
Microcontroller Reference Manual is Revision 4.1.
MPC5602D Reference Manual
Addendum
1 Addendum List for Revision 4.1 . . . . . . . . . . . . . . 2
2 Addendum List for Revision 4. . . . . . . . . . . . . . . . 3
3 Revision History . . . . . . . . . . . . . . . . . . . . . . . . . 11

Addendum List for Revision 4.1
MPC5602D Reference Manual Addendum, Rev. 2
Freescale Semiconductor2
1 Addendum List for Revision 4.1
Table 1. MPC5602D RM Rev 4.1 Addenda
Location Description
Chapter 27, “Flash Memory”
page 725
Below Table 27-4, “CFlash TestFlash Structure”.
NOTE
Unique Device ID – Memory location. This device now includes a 128-bit Unique
Identification number (UID) which is programmed during device fabrication.
Start – Stop Address Size (Bytes) Content:
• 0x00403C10 0x00403C17 8 UID 1
• 0x00403C18 0x00403C1F 8 UID 2

Addendum List for Revision 4
MPC5602D Reference Manual Addendum, Rev. 2
Freescale Semiconductor 3
2 Addendum List for Revision 4
Table 2. MPC5602DRM Rev 4 Addenda
Location Description
Chapter 6, Clock Description,
page 97
Add Note: to Section 6.8.4.1, Crystal clock monitor:
Note: Functional FXOSC monitoring can only be guaranteed when the FXOSC frequency is
greater than (FIRC / 2
RCDIV
)+0.5MHz.
Add Note: to Section 6.8.4.2, FMPLL clock monitor:
Note: Functional FMPLL monitoring can only be guaranteed when the FMPLL frequency is
greater than (FIRC / 4) + 0.5 MHz.
Chapter 8, Mode Entry
Module (MC_ME), page
125
In Table 8-3 (MC_ME memory map), change DFLAON and CFLAON bits in ME_DRUN_MC and
ME_RUN0…3_MC rows from read-only to read/write.
Chapter 8, Mode Entry
Module (MC_ME), page
125
In Figure 8-12 (DRUN Mode Configuration Register (ME_DRUN_MC)), change DFLAON and
CFLAON bits from read-only to read/write.
In Figure 8-13 (RUN0…3 Mode Configuration Registers (ME_RUN0…3_MC)), change DFLAON
and CFLAON bits from read-only to read/write.
Chapter 9, Reset Generation
Module (MC_RGM), page
191
Replace Section 9.4.7, Boot Mode Capturing, with the following:
The MC_RGM samples PA[9:8] whenever RESET is asserted until five FIRC (16 MHz internal
RC oscillator) clock cycles before its deassertion edge. The result of the sampling is used at
the beginning of reset PHASE3 for boot mode selection and is retained after RESET has been
deasserted for subsequent boots after reset sequences during which RESET is not asserted.
Note: In order to ensure that the boot mode is correctly captured, the application needs to
apply the valid boot mode value the entire time that RESET is asserted.
RESET can be asserted as a consequence of the internal reset generation. This will force
re-sampling of the boot mode pins. (See Table 9- 11 for details.)
Chapter 13, Real Time Clock /
Autonomous Periodic
Interrupt (RTC/API), page
226
In Table 13-3 (RTCC field descriptions), update the Note in RTCC[APIVAL] field description:
Note: API functionality starts only when APIVAL is nonzero. The first API interrupt takes two
more cycles because of synchronization of APIVAL to the RTC clock, and APIVAL + 1 cycles
for subsequent occurrences. After that, interrupts are periodic in nature. Because of
synchronization issues, the minimum supported value of APIVAL is 4.
Chapter 15, Enhanced Direct
Memory Access (eDMA),
page 280
Replace Section 15.5.8, Dynamic programming, with the following:
15.5.8 Dynamic programming
15.5.8.1
Dynamic channel linking
Dynamic channel linking is the process of setting the TCD.major.e_link bit
during channel execution. This bit is read from the TCD local memory at the
end of channel execution, thus allowing the user to enable the feature during
channel execution.

Addendum List for Revision 4
MPC5602D Reference Manual Addendum, Rev. 2
Freescale Semiconductor4
Chapter 15, Enhanced Direct
Memory Access (eDMA),
page 280 (cont.)
Because the user is allowed to change the configuration during execution, a
coherency model is needed. Consider the scenario where the user attempts to
execute a dynamic channel link by enabling the TCD.major.e_link bit at the
same time the eDMA engine is retiring the channel. The TCD.major.e_link
would be set in the programmer’s model, but it would be unclear whether the
actual link was made before the channel retired.
The coherency model in Table 15-24 is recommended when executing a
dynamic channel link request.
For this request, the TCD local memory controller forces the TCD.major.e_link
bit to zero on any writes to a channel’s TCD.word7 after that channel’s
TCD.done bit is set, indicating the major loop is complete.
NOTE
The user must clear the TCD.done bit before
writing the TCD.major.e_link bit. The TCD.done
bit is cleared automatically by the eDMA engine
after a channel begins execution.
15.5.8.2 Dynamic scatter/gather
Dynamic scatter/gather is the process of setting the TCD.e_sg bit during
channel execution. This bit is read from the TCD local memory at the end of
channel execution, thus allowing the user to enable the feature during channel
execution.
Because the user is allowed to change the configuration during execution, a
coherency model is needed. Consider the scenario where the user attempts to
execute a dynamic scatter/gather operation by enabling the TCD.e_sg bit at the
same time the eDMA engine is retiring the channel. The TCD.e_sg would be
set in the programmer’s model, but it would be unclear whether the actual
scatter/gather request was honored before the channel retired.
Table 2. MPC5602DRM Rev 4 Addenda (continued)
Location Description
Table 15-24. Coherency model for a dynamic channel link request
Step Action
1 Write 1b to the TCD.major.e_link bit.
2 Read back the TCD.major.e_link bit.
3 Test the TCD.major.e_link request status:
• If TCD.major.e_link = 1b, the dynamic link attempt was successful.
• If TCD.major.e_link = 0b, the attempted dynamic link did not succeed (the channel
was already retiring).

Addendum List for Revision 4
MPC5602D Reference Manual Addendum, Rev. 2
Freescale Semiconductor 5
Chapter 15, Enhanced Direct
Memory Access (eDMA),
page 280 (cont.)
Two methods for this coherency model are shown in the following subsections.
Method 1 has the advantage of reading the major.linkch field and the e_sg bit
with a single read. For both dynamic channel linking and scatter/gather
requests, the TCD local memory controller forces the TCD.major.e_link and
TCD.e_sg bits to zero on any writes to a channel’s TCD.word7 if that channel’s
TCD.done bit is set indicating the major loop is complete.
NOTE
The user must clear the TCD.done bit before
writing the TCD.major.e_link or TCD.e_sg bits.
The TCD.done bit is cleared automatically by the
eDMA engine after a channel begins execution.
15.5.8.2.1 Method 1 (channel not using major loop channel
linking)
For a channel not using major loop channel linking, the coherency model in
Table 16-25 may be used for a dynamic scatter/gather request.
When the TCD.major.e_link bit is zero, the TCD.major.linkch field is not used
by the eDMA. In this case, the TCD.major.linkch bits may be used for other
purposes. This method uses the TCD.major.linkch field as a TCD identification
(ID).
Table 2. MPC5602DRM Rev 4 Addenda (continued)
Location Description
Table 15-25. Coherency model for method 1
Step Action
1 When the descriptors are built, write a unique TCD ID in the TCD.major.linkch field for
each TCD associated with a channel using dynamic scatter/gather.
2 Write 1b to theTCD.d_req bit.
Note: Should a dynamic scatter/gather attempt fail, setting the d_req bit will prevent a
future hardware activation of this channel. This stops the channel from executing
with a destination address (daddr) that was calculated using a scatter/gather
address (written in the next step) instead of a dlast final offset value.
3 Write theTCD.dlast_sga field with the scatter/gather address.
4 Write 1b to the TCD.e_sg bit.
5 Read back the 16 bit TCD control/status field.
6 Test the TCD.e_sg request status and TCD.major.linkch value:
• If e_sg = 1b, the dynamic link attempt was successful.
• If e_sg = 0b and the major.linkch (ID) did not change, the attempted dynamic link did
not succeed (the channel was already retiring).
• If e_sg = 0b and the major.linkch (ID) changed, the dynamic link attempt was
successful (the new TCD’s e_sg value cleared the e_sg bit).

Addendum List for Revision 4
MPC5602D Reference Manual Addendum, Rev. 2
Freescale Semiconductor6
Chapter 15, Enhanced Direct
Memory Access (eDMA),
page 280 (cont.)
15.5.8.2.2 Method 2 (channel using major loop linking)
For a channel using major loop channel linking, the coherency model in
Table 15-26 may be used for a dynamic scatter/gather request. This method
uses the TCD.dlast_sga field as a TCD identification (ID).
For a channel using major loop channel linking, the coherency model in
Table 15-26 may be used for a dynamic scatter/gather request. This method
uses the TCD.dlast_sga field as a TCD identification (ID).
Chapter 15, Enhanced Direct
Memory Access (eDMA),
page 280 (cont.)
Table 2. MPC5602DRM Rev 4 Addenda (continued)
Location Description
Table 15-26.Coherency model for method 2
Step Action
1 Write 1b to theTCD.d_req bit.
Note: Should a dynamic scatter/gather attempt fail, setting the d_req bit will prevent a
future hardware activation of this channel. This stops the channel from executing
with a destination address (daddr) that was calculated using a scatter/gather
address (written in the next step) instead of a dlast final offset value.
2 Write theTCD.dlast_sga field with the scatter/gather address.
3 Write 1b to the TCD.e_sg bit.
4 Read back the TCD.e_sg bit.
5 Test the TCD.e_sg request status:
• If e_sg = 1b, the dynamic link attempt was successful.
• If e_sg = 0b, read the 32 bit TCD dlast_sga field.
• If e_sg = 0b and the dlast_sga did not change, the attempted dynamic link did not
succeed (the channel was already retiring).
• If e_sg = 0b and the dlast_sga changed, the dynamic link attempt was successful
(the new TCD’s e_sg value cleared the e_sg bit).

Addendum List for Revision 4
MPC5602D Reference Manual Addendum, Rev. 2
Freescale Semiconductor 7
Chapter 18, Crossbar Switch
(XBAR), page 325
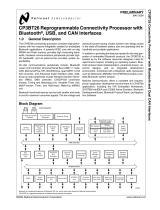
Replace Figure 18-1 (XBAR block diagram), with the following:
Replace Table 18-1 (XBAR switch ports for MPC5602D), with the following:
Chapter 18, Crossbar Switch
(XBAR), throughout
chapter
Correct “two master ports” to “three master ports” as necessary.
Chapter 18, Crossbar Switch
(XBAR), page 326
In Section 18.4, Features, add a bullet item for eDMA.
Chapter 18, Crossbar Switch
(XBAR), page 328
Replace Table 18-2 (Hardwired bus master priorities) with the following.
Table 2. MPC5602DRM Rev 4 Addenda (continued)
Location Description
CPU
Crossbar Switch
Flash
Master modules
Slave modules
CPU data
Internal
Peripheral
bridges
instructions
memory
SRAM
eDMA
Table 18-1. XBAR switch ports for MPC5602D
Module
Port
Physical master ID
Type Logical number
e200z0 core–CPU instructions Master 0 0
e200z0 core–CPU data / Nexus Master 0 1
eDMA Master 2 2
Flash memory Slave — —
Internal SRAM Slave — —
Peripheral bridges Slave — —
Table 18-2. Hardwired bus master priorities
Module
Port
Priority level
Type Master #
e200z0 core–CPU instructions Master 0 7
e200z0 core–CPU data Master 1 6
eDMA Master 2 5

Addendum List for Revision 4
MPC5602D Reference Manual Addendum, Rev. 2
Freescale Semiconductor8
Chapter 20, LINFlex, p. 394 Insert the following after Section 20.8.2.1.6, Error handling:
20.8.2.1.7 Overrun
Once the message buffer is full, the next valid message reception leads to an
overrun and a message is lost. The hardware sets the BOF bit in the LINSR to
signal the overrun condition. Which message is lost depends on the
configuration of the RX message buffer:
• If the buffer lock function is disabled (LINCR1[RBLM] = 0) the last
message stored in the buffer is overwritten by the new incoming
message. In this case the latest message is always available to the
application.
• If the buffer lock function is enabled (LINCR1[RBLM] = 0) the most
recent message is discarded and the previous message is available in the
buffer.
Chapter 21, LINFlexD, p. 414 Insert the following after Section 21.7.1.5, Error handling and detection:
21.7.1.6 Overrun
Once the message buffer is full, the next valid message reception leads to an
overrun and a message is lost. The hardware sets the BOF bit in the LINSR to
signal the overrun condition. Which message is lost depends on the
configuration of the RX message buffer:
• If the buffer lock function is disabled (LINCR1[RBLM] = 0) the last
message stored in the buffer is overwritten by the new incoming
message. In this case the latest message is always available to the
application.
• If the buffer lock function is enabled (LINCR1[RBLM] = 0) the most
recent message is discarded and the previous message is available in
the buffer.
Chapter 22, FlexCAN,
throughout chapter
Remove references throughout the chapter to “low-cost MCUs.”
Chapter 22, FlexCAN, page
491
Remove Note: at end of Section 22.2.2, FlexCAN module features:
Note: The individual Rx Mask per Message Buffer feature may not be available in low cost
MCUs. Please consult the specific MCU documentation to find out if this feature is supported.
Chapter 22, FlexCAN, page
494
Remove Note: above Ta bl e 22 -2:
Note: The individual Rx Mask per Message Buffer feature may not be available in low cost
MCUs. Please consult the specific MCU documentation to find out if this feature is supported.
If not supported, the address range 0x0880-0x097F is considered reserved space,
independent of the value of the BCC bit.
Chapter 22, FlexCAN, page
495
Added this Note in the RTR field description of Table 22-4 (Message Buffer Structure field
description):
Note: Do not configure the last Message Buffer to be the RTR frame.
Table 2. MPC5602DRM Rev 4 Addenda (continued)
Location Description

Addendum List for Revision 4
MPC5602D Reference Manual Addendum, Rev. 2
Freescale Semiconductor 9
Chapter 22, FlexCAN, page
523
Remove Note: at end of Section 25.5.6, Matching process:
Note: The individual Rx Mask per Message Buffer feature may not be available in low cost
MCUs. Please consult the specific MCU documentation to find out if this feature is supported.
If not supported, the RXGMASK, RX14MASK, and RX15MASK registers are available,
regardless of the value of the BCC bit.
Chapter 22, FlexCAN, page
527
In Section 22.5.9.4, Protocol timing, update the Note following Figure 22-15 (CAN Engine
Clocking Scheme) to read: “This clock selection feature may not be available in all MCUs. A
particular MCU may not have a PLL, in which case it would have only the oscillator clock, or
it may use only the PLL clock feeding the FlexCAN module. In these cases, the CLK_SRC bit
in the CTRL Register has no effect on the module operation.”
Chapter 22, FlexCAN, page
529
Update the table title of Table 22-21 from “CAN Standard Compliant Bit Time Segment Settings”
to “Bosch CAN 2.0B standard compliant bit time segment settings.”
Chapter 22, FlexCAN, page
529
In Section 22.5.9.4, Protocol timing, update the Note following Table 22-21 to read: “Other
combinations of Time Segment 1 and Time Segment 2 can be valid. It is the user’s
responsibility to ensure the bit time settings are in compliance with the CAN standard. For bit
time calculations, use an IPT (Information Processing Time) of 2, which is the value
implemented in the FlexCAN module.”
Chapter 25, Analog-to-Digital
Converter (ADC), page 662
In Section 25.3.2, Analog clock generator and conversion timings, remove the paragraph:
The direct clock should basically be used only in low power mode when the device is using
only the 16 MHz fast internal RC oscillator, but the conversion still requires a 16 MHz clock
(an 8 MHz clock is not fast enough). In all other cases, the ADC should use the clock divided
by two internally.
Chapter 25, Analog-to-Digital
Converter (ADC), p. 665
In Section 25.3.4.2, CTU in trigger mode, replace the sentence:
If another CTU conversion is triggered before the end of the conversion, that request is
discarded.
with:
If another CTU conversion is triggered before the end of the conversion, that request is
discarded. However, if the CTU has triggered a conversion that is still ongoing on a channel,
it will buffer a second request for the channel and wait for the end of the first conversion before
requesting another conversion. Thus, two conversion requests close together will both be
serviced.
Chapter 25, Analog-to-Digital
Converter (ADC), page 666
In Section 25.3.5.2, Presampling channel enable signals, in Table 25-5, Presampling voltage
selection based on PREVALx fields, in the 01 row, change the “Presampling voltage” field to:
V1 = V
DD_HV_ADC0
or V
DD_HV_ADC1
.
Chapter 25, Analog-to-Digital
Converter (ADC), page 676
Add Note to Section 25.3.11, Auto-clock-off mode:
Note: The auto-clock-off feature cannot operate when the digital interface runs at the same
rate as the analog interface. This means that when MCR.ADCCLKSEL = 1, the analog clock
will not shut down in IDLE mode.
Table 2. MPC5602DRM Rev 4 Addenda (continued)
Location Description

Addendum List for Revision 4
MPC5602D Reference Manual Addendum, Rev. 2
Freescale Semiconductor10
Chapter 25, Analog-to-Digital
Converter (ADC), page 676
In Section 25.4.2.2, Main Status Register (MSR), replace the ADCSTATUS field description with
the following:
The value of this parameter depends on ADC status:
000 IDLE — The ADC is powered up but idle.
001 Power-down — The ADC is powered down.
010 Wait state — The ADC is waiting for an external multiplexer. This occurs only when the
DSDR register is nonzero.
011 Reserved
100 Sample — The ADC is sampling the analog signal.
101 Reserved
110 Conversion — The ADC is converting the sampled signal.
111 Reserved
Chapter 26, Cross Triggering
Unit (CTU), page 703
At the end of Section 26.4.1, Event Configuration Registers (CTU_EVTCFGRx) (x = 0...31), add
the following Note:
NOTE
The CTU tracks issued conversion requests to the ADC. When the ADC
is being triggered by the CTU and there is a need to shut down the ADC,
the ADC must be allowed to complete conversions before being shut
down. This ensures that the CTU is notified of completion; if the ADC
is shut down while performing a CTU-triggered conversion, the CTU is
not notified and will not be able to trigger further conversions until the
device is reset.
Chapter 30, Software
Watchdog Timer (SWT),
page 827
In Figure 30-1 (SWT Control Register (SWT_CR)), correct the reset value of SWT_CR from
0x4000_011B to 0x800_0011B.
In Section 30.5.2.1, SWT Control Register (SWT_CR), remove the following sentence:
Default value for SWT_CR_RST is 0x4000_011B, corresponding to MAP1 = 1 (only data bus
access allowed), RIA = 1 (reset on invalid SWT access), SLK = 1 (soft lock), CSL = 1 (IRC
clock source for counter), FRZ = 1 (freeze on debug), WEN = 1 (watchdog enable).
In Table 30-2 (SWT_CR field descriptions), update the MAPn field description to:
Master Access Protection for Master n.
Allows specific master to update watchdog. MAP0 = CPU, MAP2=eDMA.
The platform bus master assignments are device-specific.
0 Access for the master is not enabled
1 Access for the master is enabled
Chapter 31,Error Correction
Status Module (ECSM),
page 833
Insert the following in Section 31.2, Overview:
The AIPS is the interface between the Advanced High performance Bus (AHB) interface and
on-chip IPS peripherals. IPS peripherals are modules that contain readable/writable control
and status registers. The AHB master reads and writes these registers through the AIPS. The
AIPS generates module enables, the module address, transfer attributes, byte enables, and
write data. These elements then function as inputs to the IPS peripherals.
• IPS — Inter Peripheral Subsytem
• AIPS — interface between the Advanced High performance Bus (AHB) interface and on-chip
IPS peripherals
• AHB — Advanced High-performance Bus
Table 2. MPC5602DRM Rev 4 Addenda (continued)
Location Description

Revision History
MPC5602D Reference Manual Addendum, Rev. 2
Freescale Semiconductor 11
3 Revision History
Table 3 provides a revision history for this reference manual addendum document.
Table 3. Revision History Table
Rev. Number Substantive Changes Date of Release
2.0 Added a note below “CFlash TestFlash Structure” table. 09/2013
1.0 Initial release. 05/2012

How to Reach Us:
Home Page:
www.freescale.com
Web Support:
http://www.freescale.com/support
USA/Europe or Locations Not Listed:
Freescale Semiconductor, Inc.
Technical Information Center, EL516
2100 East Elliot Road
Tempe, Arizona 85284
+1-800-521-6274 or +1-480-768-2130
www.freescale.com/support
Europe, Middle East, and Africa:
Freescale Halbleiter Deutschland GmbH
Technical Information Center
Schatzbogen 7
81829 Muenchen, Germany
+44 1296 380 456 (English)
+46 8 52200080 (English)
+49 89 92103 559 (German)
+33 1 69 35 48 48 (French)
www.freescale.com/support
Japan:
Freescale Semiconductor Japan Ltd.
Headquarters
ARCO Tower 15F
1-8-1, Shimo-Meguro, Meguro-ku,
Tokyo 153-0064
Japan
0120 191014 or +81 3 5437 9125
suppor[email protected]
Asia/Pacific:
Freescale Semiconductor China Ltd.
Exchange Building 23F
No. 118 Jianguo Road
Chaoyang District
Beijing 100022
China
+86 10 5879 8000
suppor[email protected]
For Literature Requests Only:
Freescale Semiconductor Literature Distribution Center
1-800-441-2447 or 303-675-2140
Fax: 303-675-2150
LDCForFreescaleSemiconductor@hibbertgroup.com
Information in this document is provided solely to enable system and
software implementers to use Freescale Semiconductor products. There are
no express or implied copyright licenses granted hereunder to design or
fabricate any integrated circuits or integrated circuits based on the
information in this document.
Freescale Semiconductor reserves the right to make changes without further
notice to any products herein. Freescale Semiconductor makes no warranty,
representation or guarantee regarding the suitability of its products for any
particular purpose, nor does Freescale Semiconductor assume any liability
arising out of the application or use of any product or circuit, and specifically
disclaims any and all liability, including without limitation consequential or
incidental damages. “Typical” parameters that may be provided in Freescale
Semiconductor data sheets and/or specifications can and do vary in different
applications and actual performance may vary over time. All operating
parameters, including “Typicals”, must be validated for each customer
application by customer’s technical experts. Freescale Semiconductor does
not convey any license under its patent rights nor the rights of others.
Freescale Semiconductor products are not designed, intended, or authorized
for use as components in systems intended for surgical implant into the body,
or other applications intended to support or sustain life, or for any other
application in which the failure of the Freescale Semiconductor product could
create a situation where personal injury or death may occur. Should Buyer
purchase or use Freescale Semiconductor products for any such unintended
or unauthorized application, Buyer shall indemnify and hold Freescale
Semiconductor and its officers, employees, subsidiaries, affiliates, and
distributors harmless against all claims, costs, damages, and expenses, and
reasonable attorney fees arising out of, directly or indirectly, any claim of
personal injury or death associated with such unintended or unauthorized
use, even if such claim alleges that Freescale Semiconductor was negligent
regarding the design or manufacture of the part.
Freescale™ and the Freescale logo are trademarks of Freescale
Semiconductor, Inc. All other product or service names are the property
of their respective owners.© Freescale Semiconductor, Inc. 2012-2013. All
rights reserved.
MPC5602DRMAD
Rev. 2
12/2013

Freescale Semiconductor
MPC5602DRM
Rev. 4.1, 05/2012
© Freescale Semiconductor, Inc., 2012. All rights reserved.
MPC5602D Microcontroller
Reference Manual
by: Microcontroller Solutions Group
This is the MPC5602D Reference Manual set, consisting of the following files:
• MPC5602D Reference Manual Addendum (MPC5602DRMAD), Rev. 1
• MPC5602D Reference Manual (MPC5602DRM), Rev. 4

Freescale Semiconductor
Reference Manual Addendum
MPC5602DRMAD
Rev. 1 , 05/2012
Table of Contents
© Freescale Semiconductor, Inc., 2012. All rights reserved.
This addendum document describes corrections to the
MPC5602D Microcontroller Reference Manual, order
number MPC5602DRM. For convenience, the addenda
items are grouped by revision. Please check our website
at http://www.freescale.com/powerarchitecture for the
latest updates.
The current version available of the MPC5602D
Microcontroller Reference Manual is Revision 4.
MPC5602D Reference Manual
Addendum
by: Microcontroller Solutions Group
1 Addendum List for Revision 4. . . . . . . . . . . . . . . . 2
2 Revision History . . . . . . . . . . . . . . . . . . . . . . . . . 10

Addendum List for Revision 4
MPC5602D Reference Manual Errata, Rev. 1
Freescale Semiconductor2
1 Addendum List for Revision 4
Table 1. MPC5602DRM Rev 4 Addenda
Location Description
Chapter 6, Clock Description,
page 97
Add Note: to Section 6.8.4.1, Crystal clock monitor:
Note: Functional FXOSC monitoring can only be guaranteed when the FXOSC frequency is
greater than (FIRC / 2
RCDIV
)+0.5MHz.
Add Note: to Section 6.8.4.2, FMPLL clock monitor:
Note: Functional FMPLL monitoring can only be guaranteed when the FMPLL frequency is
greater than (FIRC / 4) + 0.5 MHz.
Chapter 8, Mode Entry
Module (MC_ME), page
125
In Table 8-3 (MC_ME memory map), change DFLAON and CFLAON bits in ME_DRUN_MC and
ME_RUN0…3_MC rows from read-only to read/write.
Chapter 8, Mode Entry
Module (MC_ME), page
125
In Figure 8-12 (DRUN Mode Configuration Register (ME_DRUN_MC)), change DFLAON and
CFLAON bits from read-only to read/write.
In Figure 8-13 (RUN0…3 Mode Configuration Registers (ME_RUN0…3_MC)), change DFLAON
and CFLAON bits from read-only to read/write.
Chapter 9, Reset Generation
Module (MC_RGM), page
191
Replace Section 9.4.7, Boot Mode Capturing, with the following:
The MC_RGM samples PA[9:8] whenever RESET is asserted until five FIRC (16 MHz internal
RC oscillator) clock cycles before its deassertion edge. The result of the sampling is used at
the beginning of reset PHASE3 for boot mode selection and is retained after RESET has been
deasserted for subsequent boots after reset sequences during which RESET is not asserted.
Note: In order to ensure that the boot mode is correctly captured, the application needs to
apply the valid boot mode value the entire time that RESET is asserted.
RESET can be asserted as a consequence of the internal reset generation. This will force
re-sampling of the boot mode pins. (See Table 9- 11 for details.)
Chapter 13, Real Time Clock /
Autonomous Periodic
Interrupt (RTC/API), page
226
In Table 13-3 (RTCC field descriptions), update the Note in RTCC[APIVAL] field description:
Note: API functionality starts only when APIVAL is nonzero. The first API interrupt takes two
more cycles because of synchronization of APIVAL to the RTC clock, and APIVAL + 1 cycles
for subsequent occurrences. After that, interrupts are periodic in nature. Because of
synchronization issues, the minimum supported value of APIVAL is 4.
Chapter 15, Enhanced Direct
Memory Access (eDMA),
page 280
Replace Section 15.5.8, Dynamic programming, with the following:
15.5.8 Dynamic programming
15.5.8.1
Dynamic channel linking
Dynamic channel linking is the process of setting the TCD.major.e_link bit
during channel execution. This bit is read from the TCD local memory at the
end of channel execution, thus allowing the user to enable the feature during
channel execution.

Addendum List for Revision 4
MPC5602D Reference Manual Errata, Rev. 1
Freescale Semiconductor 3
Chapter 15, Enhanced Direct
Memory Access (eDMA),
page 280 (cont.)
Because the user is allowed to change the configuration during execution, a
coherency model is needed. Consider the scenario where the user attempts to
execute a dynamic channel link by enabling the TCD.major.e_link bit at the
same time the eDMA engine is retiring the channel. The TCD.major.e_link
would be set in the programmer’s model, but it would be unclear whether the
actual link was made before the channel retired.
The coherency model in Table 15-24 is recommended when executing a
dynamic channel link request.
For this request, the TCD local memory controller forces the TCD.major.e_link
bit to zero on any writes to a channel’s TCD.word7 after that channel’s
TCD.done bit is set, indicating the major loop is complete.
NOTE
The user must clear the TCD.done bit before
writing the TCD.major.e_link bit. The TCD.done
bit is cleared automatically by the eDMA engine
after a channel begins execution.
15.5.8.2 Dynamic scatter/gather
Dynamic scatter/gather is the process of setting the TCD.e_sg bit during
channel execution. This bit is read from the TCD local memory at the end of
channel execution, thus allowing the user to enable the feature during channel
execution.
Because the user is allowed to change the configuration during execution, a
coherency model is needed. Consider the scenario where the user attempts to
execute a dynamic scatter/gather operation by enabling the TCD.e_sg bit at the
same time the eDMA engine is retiring the channel. The TCD.e_sg would be
set in the programmer’s model, but it would be unclear whether the actual
scatter/gather request was honored before the channel retired.
Table 1. MPC5602DRM Rev 4 Addenda (continued)
Location Description
Table 15-24. Coherency model for a dynamic channel link request
Step Action
1 Write 1b to the TCD.major.e_link bit.
2 Read back the TCD.major.e_link bit.
3 Test the TCD.major.e_link request status:
• If TCD.major.e_link = 1b, the dynamic link attempt was successful.
• If TCD.major.e_link = 0b, the attempted dynamic link did not succeed (the channel
was already retiring).

Addendum List for Revision 4
MPC5602D Reference Manual Errata, Rev. 1
Freescale Semiconductor4
Chapter 15, Enhanced Direct
Memory Access (eDMA),
page 280 (cont.)
Two methods for this coherency model are shown in the following subsections.
Method 1 has the advantage of reading the major.linkch field and the e_sg bit
with a single read. For both dynamic channel linking and scatter/gather
requests, the TCD local memory controller forces the TCD.major.e_link and
TCD.e_sg bits to zero on any writes to a channel’s TCD.word7 if that channel’s
TCD.done bit is set indicating the major loop is complete.
NOTE
The user must clear the TCD.done bit before
writing the TCD.major.e_link or TCD.e_sg bits.
The TCD.done bit is cleared automatically by the
eDMA engine after a channel begins execution.
15.5.8.2.1 Method 1 (channel not using major loop channel
linking)
For a channel not using major loop channel linking, the coherency model in
Table 16-25 may be used for a dynamic scatter/gather request.
When the TCD.major.e_link bit is zero, the TCD.major.linkch field is not used
by the eDMA. In this case, the TCD.major.linkch bits may be used for other
purposes. This method uses the TCD.major.linkch field as a TCD identification
(ID).
Table 1. MPC5602DRM Rev 4 Addenda (continued)
Location Description
Table 15-25. Coherency model for method 1
Step Action
1 When the descriptors are built, write a unique TCD ID in the TCD.major.linkch field for
each TCD associated with a channel using dynamic scatter/gather.
2 Write 1b to theTCD.d_req bit.
Note: Should a dynamic scatter/gather attempt fail, setting the d_req bit will prevent a
future hardware activation of this channel. This stops the channel from executing
with a destination address (daddr) that was calculated using a scatter/gather
address (written in the next step) instead of a dlast final offset value.
3 Write theTCD.dlast_sga field with the scatter/gather address.
4 Write 1b to the TCD.e_sg bit.
5 Read back the 16 bit TCD control/status field.
6 Test the TCD.e_sg request status and TCD.major.linkch value:
• If e_sg = 1b, the dynamic link attempt was successful.
• If e_sg = 0b and the major.linkch (ID) did not change, the attempted dynamic link did
not succeed (the channel was already retiring).
• If e_sg = 0b and the major.linkch (ID) changed, the dynamic link attempt was
successful (the new TCD’s e_sg value cleared the e_sg bit).

Addendum List for Revision 4
MPC5602D Reference Manual Errata, Rev. 1
Freescale Semiconductor 5
Chapter 15, Enhanced Direct
Memory Access (eDMA),
page 280 (cont.)
15.5.8.2.2 Method 2 (channel using major loop linking)
For a channel using major loop channel linking, the coherency model in
Table 15-26 may be used for a dynamic scatter/gather request. This method
uses the TCD.dlast_sga field as a TCD identification (ID).
For a channel using major loop channel linking, the coherency model in
Table 15-26 may be used for a dynamic scatter/gather request. This method
uses the TCD.dlast_sga field as a TCD identification (ID).
Chapter 15, Enhanced Direct
Memory Access (eDMA),
page 280 (cont.)
Table 1. MPC5602DRM Rev 4 Addenda (continued)
Location Description
Table 15-26.Coherency model for method 2
Step Action
1 Write 1b to theTCD.d_req bit.
Note: Should a dynamic scatter/gather attempt fail, setting the d_req bit will prevent a
future hardware activation of this channel. This stops the channel from executing
with a destination address (daddr) that was calculated using a scatter/gather
address (written in the next step) instead of a dlast final offset value.
2 Write theTCD.dlast_sga field with the scatter/gather address.
3 Write 1b to the TCD.e_sg bit.
4 Read back the TCD.e_sg bit.
5 Test the TCD.e_sg request status:
• If e_sg = 1b, the dynamic link attempt was successful.
• If e_sg = 0b, read the 32 bit TCD dlast_sga field.
• If e_sg = 0b and the dlast_sga did not change, the attempted dynamic link did not
succeed (the channel was already retiring).
• If e_sg = 0b and the dlast_sga changed, the dynamic link attempt was successful
(the new TCD’s e_sg value cleared the e_sg bit).

Addendum List for Revision 4
MPC5602D Reference Manual Errata, Rev. 1
Freescale Semiconductor6
Chapter 18, Crossbar Switch
(XBAR), page 325
Replace Figure 18-1 (XBAR block diagram), with the following:
Replace Table 18-1 (XBAR switch ports for MPC5602D), with the following:
Chapter 18, Crossbar Switch
(XBAR), throughout
chapter
Correct “two master ports” to “three master ports” as necessary.
Chapter 18, Crossbar Switch
(XBAR), page 326
In Section 18.4, Features, add a bullet item for eDMA.
Chapter 18, Crossbar Switch
(XBAR), page 328
Replace Table 18-2 (Hardwired bus master priorities) with the following.
Table 1. MPC5602DRM Rev 4 Addenda (continued)
Location Description
CPU
Crossbar Switch
Flash
Master modules
Slave modules
CPU data
Internal
Peripheral
bridges
instructions
memory
SRAM
eDMA
Table 18-1. XBAR switch ports for MPC5602D
Module
Port
Physical master ID
Type Logical number
e200z0 core–CPU instructions Master 0 0
e200z0 core–CPU data / Nexus Master 0 1
eDMA Master 2 2
Flash memory Slave — —
Internal SRAM Slave — —
Peripheral bridges Slave — —
Table 18-2. Hardwired bus master priorities
Module
Port
Priority level
Type Master #
e200z0 core–CPU instructions Master 0 7
e200z0 core–CPU data Master 1 6
eDMA Master 2 5
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
/