
Type QD75P/QD75D Positioning Module User's Manual
U
User's Manual User's Manual
Mitsubishi Programmable
Logic Controller
When exported from Japan, this manual does not require application to the
Ministry of International Trade and Industry for service transaction permission.
Specifications subject to change without notice.
Printed in Japan on recycled paper.
HEAD OFFICE : MITSUBISHI DENKI BLDG MARUNOUCHI TOKYO 100-8310 TELEX : J24532 CABLE MELCO TOKYO
NAGOYA WORKS : 1-14 , YADA-MINAMI 5 , HIGASHI-KU, NAGOYA , JAPAN
MODEL
MODEL
CODE
QD75-U-S-E
13JR09
SH(NA)-080058-C(0106)MEE
Type QD75P/QD75D Positioning Module
Type QD75P/QD75D Positioning Module
QD75P1
QD75P2
QD75P4
QD75D1
QD75D2
QD75D4


A - 1
SAFETY INSTRUCTIONS
(Always read these instructions before using this equipment.)
Before using this product, please read this manual and the relevant manuals introduced in this manual
carefully and pay full attention to safety to handle the product correctly.
The instructions given in this manual are concerned with this product. For the safety instructions of the
programmable logic controller system, please read the CPU module User's Manual.
In this manual, the safety instructions are ranked as "DANGER" and "CAUTION".
!
DANGER
CAUTION
!
Indicates that incorrect handling may cause hazardous conditions,
resulting in death or severe injury.
Indicates that incorrect handling may cause hazardous conditions,
resulting in medium or slight personal injury or physical damage.
Note that the
!
CAUTION level may lead to a serious consequence according to the circumstances.
Always follow the instructions of both levels because they are important to personal safety.
Please save this manual to make it accessible when required and always forward it to the end user.
[Design Instructions]
!
DANGER
Provide a safety circuit outside the programmable logic controller so that the entire system will
operate safely even when an external power supply error or PLC fault occurs.
Failure to observe this could lead to accidents for incorrect outputs or malfunctioning.
(1) Configure an emergency stop circuit and interlock circuit such as a positioning upper
limit/lower limit to prevent mechanical damage outside the PLC.
(2) The machine OPR operation is controlled by the OPR direction and OPR speed data.
Deceleration starts when the near-point dog turns ON. Thus, if the OPR direction is
incorrectly set, deceleration will not start and the machine will continue to travel. Configure
an interlock circuit to prevent mechanical damage outside the PLC.
(3) When the module detects an error, normally deceleration stop or sudden stop will take
place according to the parameter stop group settings.
Set the parameters to the positioning system specifications.
Make sure that the OPR parameter and positioning data are within the parameter setting
values.

A - 2
[Design Instructions]
!
CAUTION
Do not bundle or adjacently lay the control wire or communication cable with the main circuit or
power wire.
Separate these by 100mm (3.94in.) or more.
Failure to observe this could lead to malfunctioning caused by noise.
[Mounting Instructions]
!
CAUTION
Use the PLC within the general specifications environment given in this manual.
Using the PLC outside the general specification range environment could lead to electric
shocks, fires, malfunctioning, product damage or deterioration.
While pressing the installation lever located at the bottom of module, insert the module fixing
tab into the fixing hole in the base unit until it stops. Then, securely mount the module with the
fixing hole as a supporting point.
Incorrect loading of the module can cause a malfunction, failure or drop.
When using the PLC in the environment of much vibration, tighten the module with a screw.
Tighten the screw in the specified torque range.
Undertightening can cause a drop, short circuit or malfunction.
Overtightening can cause a drop, short circuit or malfunction due to damage to the screw or
module.
Completely turn off the externally supplied power used in the system before mounting or
removing the module.
Not doing so may damage the product.
[Wiring Instructions]
!
DANGER
Always confirm the terminal layout before connecting the wires to the module.
[Startup/Maintenance Instructions]
!
DANGER
Completely turn off the externally supplied power used in the system before cleaning or
tightening the screws.
Failure to turn all phases OFF could lead to electric shocks.

A - 3
[Startup/Maintenance Instructions]
!
CAUTION
Never disassemble or modify the module.
Failure to observe this could lead to trouble, malfunctioning, injuries or fires.
Completely turn off the externally supplied power used in the system before installing or
removing the module.
Failure to turn all phases OFF could lead to module trouble or malfunctioning.
Do not mount/remove the module onto/from the base unit more than 50 times (IEC61131-2-
compliant), after the first use of the product. Failure to do so may cause malfunction.
Before starting test operation, set the parameter speed limit value to the slowest value, and
make sure that operation can be stopped immediately if a hazardous state occurs.
Always make sure to touch the grounded metal to discharge the electricity charged in the body,
etc., before touching the module.
Failure to do so may cause a failure or malfunctions of the module.
[Precautions for use]
!
CAUTION
Note that when the reference axis speed is designated for interpolation operation, the speed of
the partner axis (2nd axis, 3rd axis and 4th axis) may be larger than the set speed (larger than
the speed limit value).
[Disposal Instructions]
!
CAUTION
When disposing of the product, handle it as industrial waste.

A - 4
REVISIONS
The manual number is given on the bottom left of the back cover
.
Print Date
Manual Number Revision
Dec., 1999 SH (NA)-080058-A First edition
Oct., 2000 SH (NA)-080058-B Addition of function version B
(Overall revisions based on the Japanese Manual Version
SH-080047-E)
Jun., 2001 SH (NA)-080058-C The software package names (GPP function software package,
QD75 software package) have been replaced by the product names
(GX Developer, GX Configurator-QP) for standardization.
Partial corrections and additions
CONTENTS, About Manuals, Generic Terms and Abbreviations,
Section 1.4, Section 2.2, Section 2.3, Section 3.2.2 to Section 3.2.4,
Section 3.3.2, Section 3.3.3, Section 3.4.1, Section 3.4.3, Section
3.4.4, Section 4.1.2, Section 4.3, Section 5.1.2, Section 5.1.3, Section
5.2.3, Section 5.2.5, Section 5.6.2, Section 5.7.1, Section 6.2 to
Section 6.4, Section 6.5.3, Section 7.2, Section 8.2.2, Section 8.2.5,
Section 8.2.6, Section 9.1.2, Section 9.2.1, Section 9.2.16, Section
9.2.17, Section 10.3.2, Section 10.6.2, Section 11.2.3, Section 11.3.3,
Section 11.3.4, Section 11.4.3, Section 12.1.1, Section 12.5 to Section
12.7, Section 13.1, Section 13.3, Section 13.4, Section 14.2 to Section
14.7, Section 15.1, Section 15.2, Section 15.4, Appendix 1, Appendix
9.2, Appendix 11, INDEX
Apr., 2003 SH (NA)-080058-D
Partial corrections and additions
SAFETY INSTRUCTIONS, CONTENTS, Component List,
Section 1.2.3, Section 1.4, Section 2.3, Section 2.4, Section 3.1,
Section 3.2.1, Section 3.2.3, Section 3.2.4, Section 3.4.1, Section
3.4.4, Section 4.1.2, Section 4.3.1, Section 4.3.2, Section 5.1.1,
Section 5.1.7, Section 5.1.8, Section 5.2.1, Section 5.2.4, Section
5.6.2, Section 5.7.1, Section 6.4, Section 6.5.4, Section 6.5.6, Section
8.2.3 to Section 8.2.8, Section 9.2.17, Section 9.2.19, Section 11.2.1,
Section 11.3.1, Section 11.4.1, Section 12.1.1, Section 12.5.1, Section
12.5.2, Section 12.7.3, Section 12.7.5, Section 12.7.9, Section 14.4,
Section 15.2, Appendix 1.1, Appendix 4.1 to Appendix 4.3, Appendix
7.1, Appendix 9.2, Appendix 10 to Appendix 13, INDEX
Oct., 2003 SH (NA)-080058-E
Partial corrections and additions
CONTENTS, Section 1.1.1, Section 1.4, Section 2.2, Section 2.4,
Section 3.2.1, Section 3.2.3, Section 3.2.4, Section 3.3.2, Section
3.4.3, Section 3.4.4, Section 5.1.1, Section 5.1.8, Section 5.7.1,
Section 6.5.3, Section 6.5.6, Section 7.1.2, Section 9.1.2, Section
9.2.3 to Section 9.2.9, Section 11.2.1, Section 11.3.1, Section 11.4.1,
Section 12.2.1, Section 12.7.10, Appendix 9.2, Appendix 12, INDEX

A - 5
REVISIONS
The manual number is given on the bottom left of the back cover
.
Print Date
Manual Number Revision
Feb., 2004 SH (NA)-080058-F
Partial corrections and additions
CONTENTS, Section 3.4.1, Section 3.4.3, Section 3.4.4,
Section 5.2.1, Section 5.4, Section 5.5, Section 5.6.2, Section 8.2.6,
Section 10.1.2, Section 10.3.3, Section 10.3.5, Section 10.3.7,
Appendix 9.2, Appendix 12
Nov., 2004 SH (NA)-080058-G
Partial corrections and additions
SAFETY INSTRUCTIONS, Section 1.4, Section 2.3, Section 2.4,
Section 4.2.1, Section 4.3.1, Section 4.5.1, Section 5.1.7,
Section 5.2.1, Section 5.2.6, Section 5.6.2, Section 6.1,
Section 9.2.19, Section 12.2.1, Section 12.4.4, Section 12.7.4,
Appendix 1.1, Appendix 9.1
Jun., 2005 SH (NA)-080058-H
Partial corrections and additions
Section 5.1.2, Section 9.1.2, Section 9.2.10, Section 9.2.21,
Section 10.3.8, Section 11.4.1, Section 12.5.2, Section 12.7.1,
Section 12.7.6, Section 15.1, Section 15.2
Japanese Manual Version SH-0800047-L
This manual confers no industrial property rights or any rights of any other kind, nor does it confer any patent licenses.
Mitsubishi Electric Corporation cannot be held responsible for any problems involving industrial property rights which
may occur as a result of using the contents noted in this manual.
1999 MITSUBISHI ELECTRIC CORPORATION

A - 6
INTRODUCTION
Thank you for purchasing the Mitsubishi general-purpose programmable logic controller MELSEC-Q Series.
Always read through this manual, and fully comprehend the functions and performance of the Q Series PLC
before starting use to ensure correct usage of this product.
CONTENTS
SAFETY INSTRUCTIONS.............................................................................................................................A- 1
REVISIONS....................................................................................................................................................A- 4
INTRODUCTION ...........................................................................................................................................A- 6
CONTENTS....................................................................................................................................................A- 6
About Manuals ..............................................................................................................................................A- 13
Using This Manual.........................................................................................................................................A- 13
Conformation to the EMC AND LOW-VOLTAGE DIRECTIVES.................................................................A- 13
Generic Terms and Abbreviations................................................................................................................A- 14
Component List.............................................................................................................................................A- 15
Section 1 Product Specifications and Handling
1. Product Outline 1- 1 to 1- 22
1.1 Positioning control....................................................................................................................................1- 2
1.1.1 Features of QD75..............................................................................................................................1- 2
1.1.2 Purpose and applications of positioning control...............................................................................1- 5
1.1.3 Mechanism of positioning control .....................................................................................................1- 7
1.1.4 Outline design of positioning system................................................................................................1- 9
1.1.5 Communicating signals between QD75 and each module.............................................................1- 12
1.2 Flow of system operation........................................................................................................................1- 15
1.2.1 Flow of all processes........................................................................................................................1- 15
1.2.2 Outline of starting.............................................................................................................................1- 18
1.2.3 Outline of stopping ...........................................................................................................................1- 20
1.2.4 Outline for restarting.........................................................................................................................1- 21
1.3 Restrictions with a system using a stepping motor................................................................................1- 22
1.4 Function additions/modifications according to function version B.........................................................1- 22
2. System Configuration 2- 1 to 2- 6
2.1 General image of system.........................................................................................................................2- 2
2.2 Component list .........................................................................................................................................2- 4
2.3 Applicable system....................................................................................................................................2- 5
2.4 How to check the function version and SERIAL No. .............................................................................2- 6

A - 7
3. Specifications and Functions 3- 1 to 3- 24
3.1 Performance specifications......................................................................................................................3- 2
3.2 List of functions .......................................................................................................................................3- 4
3.2.1 QD75 control functions......................................................................................................................3- 4
3.2.2 QD75 main functions.........................................................................................................................3- 6
3.2.3 QD75 sub functions and common functions ....................................................................................3- 8
3.2.4 Combination of QD75 main functions and sub functions................................................................3- 12
3.3 Specifications of input/output signals with PLC CPU.............................................................................3- 14
3.3.1 List of input/output signals with PLC CPU.......................................................................................3- 14
3.3.2 Details of input signals (QD75
PLC CPU) ..................................................................................3- 15
3.3.3 Details of output signals (PLC CPU
QD75)................................................................................3- 16
3.4 Specifications of input/output interfaces with external devices .............................................................3- 17
3.4.1 Electrical specifications of input/output signals...............................................................................3- 17
3.4.2 Signal layout for external device connection connector..................................................................3- 19
3.4.3 List of input/output signal details......................................................................................................3- 20
3.4.4 Input/output interface internal circuit................................................................................................3- 22
4. Installation, Wiring and Maintenance of the Product 4- 1 to 4- 16
4.1 Outline of installation, wiring and maintenance.......................................................................................4- 2
4.1.1 Installation, wiring and maintenance procedures.............................................................................4- 2
4.1.2 Names of each part...........................................................................................................................4- 3
4.1.3 Handling precautions ........................................................................................................................4- 5
4.2 Installation ................................................................................................................................................4- 7
4.2.1 Precautions for installation................................................................................................................4- 7
4.3 Wiring........................................................................................................................................................4- 8
4.3.1 Precautions for wiring........................................................................................................................4- 8
4.3.2 Wiring of the differential driver common terminal............................................................................4- 13
4.4 Confirming the installation and wiring.....................................................................................................4- 14
4.4.1 Items to confirm when installation and wiring are completed.........................................................4- 14
4.5 Maintenance............................................................................................................................................4- 15
4.5.1 Precautions for maintenance...........................................................................................................4- 15
4.5.2 Disposal instructions ........................................................................................................................4- 15
5. Data Used for Positioning Control (List of buffer memory addresses) 5- 1 to 5-132
5.1 Types of data............................................................................................................................................5- 2
5.1.1 Parameters and data required for control.........................................................................................5- 2
5.1.2 Setting items for positioning parameters..........................................................................................5- 4
5.1.3 Setting items for OPR parameters....................................................................................................5- 6
5.1.4 Setting items for positioning data......................................................................................................5- 7
5.1.5 Setting items for block start data .....................................................................................................5- 10
5.1.6 Setting items for condition data .......................................................................................................5- 11
5.1.7 Types and roles of monitor data......................................................................................................5- 12
5.1.8 Types and roles of control data .......................................................................................................5- 16

A - 8
5.2 List of parameters ...................................................................................................................................5- 20
5.2.1 Basic parameters 1 ..........................................................................................................................5- 20
5.2.2 Basic parameters 2 ..........................................................................................................................5- 26
5.2.3 Detailed parameters 1......................................................................................................................5- 28
5.2.4 Detailed parameters 2......................................................................................................................5- 36
5.2.5 OPR basic parameters.....................................................................................................................5- 46
5.2.6 OPR detailed parameters ................................................................................................................5- 54
5.3 List of positioning data ............................................................................................................................5- 58
5.4 List of block start data.............................................................................................................................5- 74
5.5 List of condition data...............................................................................................................................5- 80
5.6 List of monitor data..................................................................................................................................5- 86
5.6.1 System monitor data........................................................................................................................5- 86
5.6.2 Axis monitor data..............................................................................................................................5- 96
5.7 List of control data..................................................................................................................................5-110
5.7.1 System control data.........................................................................................................................5-110
5.7.2 Axis control data..............................................................................................................................5-112
6. Sequence Program Used for Positioning Control 6- 1 to 6- 44
6.1 Precautions for creating program............................................................................................................6- 2
6.2 List of devices used..................................................................................................................................6- 5
6.3 Creating a program.................................................................................................................................6- 11
6.3.1 General configuration of program....................................................................................................6- 11
6.3.2 Positioning control operation program.............................................................................................6- 12
6.4 Positioning program examples...............................................................................................................6- 15
6.5 Program details.......................................................................................................................................6- 24
6.5.1 Initialization program........................................................................................................................6- 24
6.5.2 Start details setting program............................................................................................................6- 25
6.5.3 Start program....................................................................................................................................6- 27
6.5.4 Continuous operation interrupt program..........................................................................................6- 37
6.5.5 Restart program ...............................................................................................................................6- 39
6.5.6 Stop program....................................................................................................................................6- 42
7. Memory Configuration and Data Process 7- 1 to 7- 12
7.1 Configuration and roles of QD75 memory...............................................................................................7- 2
7.1.1 Configuration and roles of QD75 memory........................................................................................7- 2
7.1.2 Buffer memory area configuration....................................................................................................7- 5
7.2 Data transmission process ......................................................................................................................7- 6

A - 9
Section 2 Control Details and Setting
8. OPR Control 8- 1 to 8- 22
8.1 Outline of OPR control.............................................................................................................................8- 2
8.1.1 Two types of OPR control.................................................................................................................8- 2
8.2 Machine OPR...........................................................................................................................................8- 4
8.2.1 Outline of the machine OPR operation.............................................................................................8- 4
8.2.2 Machine OPR method.......................................................................................................................8- 5
8.2.3 OPR method (1): Near-point dog method........................................................................................8- 6
8.2.4 OPR method (2): Stopper method 1) ...............................................................................................8- 8
8.2.5 OPR method (3): Stopper method 2) ..............................................................................................8- 11
8.2.6 OPR method (4): Stopper method 3) ..............................................................................................8- 14
8.2.7 OPR method (5): Count method 1)..................................................................................................8- 16
8.2.8 OPR method (6): Count method 2)..................................................................................................8- 18
8.3 Fast OPR.................................................................................................................................................8- 20
8.3.1 Outline of the fast OPR operation....................................................................................................8- 20
9. Major Positioning Control 9- 1 to 9-114
9.1 Outline of major positioning controls .......................................................................................................9- 2
9.1.1 Data required for major positioning control ......................................................................................9- 4
9.1.2 Operation patterns of major positioning controls .............................................................................9- 5
9.1.3 Designating the positioning address................................................................................................9- 15
9.1.4 Confirming the current value............................................................................................................9- 16
9.1.5 Control unit "degree" handling.........................................................................................................9- 18
9.1.6 Interpolation control..........................................................................................................................9- 21
9.2 Setting the positioning data ...................................................................................................................9- 25
9.2.1 Relation between each control and positioning data......................................................................9- 25
9.2.2 1-axis linear control..........................................................................................................................9- 27
9.2.3 2-axis linear interpolation control.....................................................................................................9- 29
9.2.4 3-axis linear interpolation control.....................................................................................................9- 33
9.2.5 4-axis linear interpolation control.....................................................................................................9 -39
9.2.6 1-axis fixed-feed control...................................................................................................................9- 43
9.2.7 2-axis fixed-feed control (interpolation) ...........................................................................................9- 45
9.2.8 3-axis fixed-feed control (interpolation) ...........................................................................................9- 47
9.2.9 4-axis fixed-feed control (interpolation) ..........................................................................................9- 51
9.2.10 2-axis circular interpolation control with sub point designation.....................................................9- 53
9.2.11 2-axis circular interpolation control with center point designation................................................9- 59
9.2.12 1-axis speed control.......................................................................................................................9- 67
9.2.13 2-axis speed control.......................................................................................................................9- 70
9.2.14 3-axis speed control.......................................................................................................................9- 73
9.2.15 4-axis speed control.......................................................................................................................9- 77
9.2.16 Speed-position switching control (INC mode)...............................................................................9- 82
9.2.17 Speed-position switching control (ABS mode)..............................................................................9- 90
9.2.18 Position-speed switching control ...................................................................................................9- 98
9.2.19 Current value changing.................................................................................................................9-105

A - 10
9.2.20 NOP instruction.............................................................................................................................9-110
9.2.21 JUMP instruction...........................................................................................................................9-111
9.2.22 LOOP.............................................................................................................................................9-113
9.2.23 LEND.............................................................................................................................................9-114
10. High-Level Positioning Control 10- 1 to 10- 26
10.1 Outline of high-level positioning control...............................................................................................10- 2
10.1.1 Data required for high-level positioning control............................................................................10- 3
10.1.2 " Block start data" and "condition data" configuration..................................................................10- 4
10.2 High-level positioning control execution procedure ...........................................................................10- 6
10.3 Setting the block start data..................................................................................................................10- 7
10.3.1 Relation between various controls and block start data ..............................................................10- 7
10.3.2 Block start (normal start) ..............................................................................................................10- 8
10.3.3 Condition start ..............................................................................................................................10- 10
10.3.4 Wait start.......................................................................................................................................10- 11
10.3.5 Simultaneous start ......................................................................................................................10- 12
10.3.6 Repeated start (FOR loop) ..........................................................................................................10- 13
10.3.7 Repeated start (FOR condition) ..................................................................................................10- 14
10.3.8 Restrictions when using the NEXT start......................................................................................10- 15
10.4 Setting the condition data...................................................................................................................10- 16
10.4.1 Relation between various controls and the condition data.........................................................10- 16
10.4.2 Condition data setting examples .................................................................................................10- 19
10.5 Multiple axes simultaneous start control............................................................................................10- 20
10.6 Start program for high-level positioning control .................................................................................10- 23
10.6.1 Starting high-level positioning control..........................................................................................10- 23
10.6.2 Example of a start program for high-level positioning control.....................................................10- 24
11. Manual Control 11- 1 to 11- 36
11.1 Outline of manual control ....................................................................................................................11- 2
11.1.1 Three manual control methods.....................................................................................................11- 2
11.2 JOG operation......................................................................................................................................11- 4
11.2.1 Outline of JOG operation..............................................................................................................11- 4
11.2.2 JOG operation execution procedure ............................................................................................11- 7
11.2.3 Setting the required parameters for JOG operation.....................................................................11- 8
11.2.4 Creating start programs for JOG operation.................................................................................11- 10
11.2.5 JOG operation example...............................................................................................................11- 13
11.3 Inching operation.................................................................................................................................11- 17
11.3.1 Outline of inching operation.........................................................................................................11- 17
11.3.2 Inching operation execution procedure.......................................................................................11- 20
11.3.3 Setting the required parameters for inching operation................................................................11- 21
11.3.4 Creating a program to enable/disable the inching operation......................................................11- 22
11.3.5 Inching operation example...........................................................................................................11- 25
11.4 Manual pulse generator operation......................................................................................................11- 27
11.4.1 Outline of manual pulse generator operation..............................................................................11- 27
11.4.2 Manual pulse generator operation execution procedure............................................................11- 31
11.4.3 Setting the required parameters for manual pulse generator operation ....................................11- 32

A - 11
11.4.4 Creating a program to enable/disable the manual pulse generator operation ..........................11- 33
12. Control Sub Functions 12- 1 to 12- 98
12.1 Outline of sub functions .......................................................................................................................12- 2
12.1.1 Outline of sub functions.................................................................................................................12- 2
12.2 Sub functions specifically for machine OPR.......................................................................................12- 4
12.2.1 OPR retry function.........................................................................................................................12- 4
12.2.2 OP shift function ...........................................................................................................................12- 8
12.3 Functions for compensating the control.............................................................................................12- 11
12.3.1 Backlash compensation function.................................................................................................12- 11
12.3.2 Electronic gear function................................................................................................................12- 13
12.3.3 Near pass function.......................................................................................................................12- 18
12.4 Functions to limit the control...............................................................................................................12- 21
12.4.1 Speed limit function......................................................................................................................12- 21
12.4.2 Torque limit function.....................................................................................................................12- 23
12.4.3 Software stroke limit function.......................................................................................................12- 26
12.4.4 Hardware stroke limit function .....................................................................................................12- 32
12.5 Functions to change the control details..............................................................................................12- 34
12.5.1 Speed change function ................................................................................................................12- 34
12.5.2 Override function..........................................................................................................................12- 41
12.5.3 Acceleration/deceleration time change function .........................................................................12- 44
12.5.4 Torque change function ...............................................................................................................12- 48
12.6 Absolute position restoration function ................................................................................................12- 50
12.7 Other functions....................................................................................................................................12- 58
12.7.1 Step function.................................................................................................................................12- 58
12.7.2 Skip function.................................................................................................................................12- 63
12.7.3 M code output function.................................................................................................................12- 66
12.7.4 Teaching function.........................................................................................................................12- 70
12.7.5 Target position change function...................................................................................................12- 77
12.7.6 Command in-position function.....................................................................................................12- 81
12.7.7 Acceleration/deceleration processing function............................................................................12- 84
12.7.8 Pre-reading start function.............................................................................................................12- 87
12.7.9 Deceleration start flag function....................................................................................................12- 92
12.7.10 Stop command processing for deceleration stop function........................................................12- 96
13. Common Functions 13- 1 to 13- 8
13.1 Outline of common functions...............................................................................................................13- 2
13.2 Parameter initialization function...........................................................................................................13- 3
13.3 Execution data backup function...........................................................................................................13- 5
13.4 External I/O signal logic switching function.........................................................................................13- 7
13.5 External I/O signal monitor function ....................................................................................................13- 8
14. Dedicated instructions 14- 1 to 14- 22
14.1 List of dedicated instructions ...............................................................................................................14- 2
14.2 Interlock during dedicated instruction is executed..............................................................................14- 2
14.3 ABRST1, ABRST2, ABRST3, ABRST4..............................................................................................14- 3

A - 12
14.4 PSTRT1, PSTRT2, PSTRT3, PSTRT4...............................................................................................14- 8
14.5 TEACH1, TEACH2, TEACH3, TEACH4............................................................................................14- 12
14.6 PFWRT................................................................................................................................................14- 16
14.7 PINIT ...................................................................................................................................................14- 20
15. Troubleshooting 15- 1 to 15- 38
15.1 Error and warning details.....................................................................................................................15- 2
15.2 List of errors .........................................................................................................................................15- 6
15.3 List of warnings...................................................................................................................................15- 32
15.4 LED display functions .........................................................................................................................15- 38
Appendices Appendix- 1 to Appendix-108
Appendix 1 Version up of the functions............................................................................................Appendix- 2
Appendix 1.1 Comparison of functions according to function versions.......................................Appendix- 2
Appendix 2 Format sheets................................................................................................................Appendix- 4
Appendix 2.1 Positioning Module operation chart .......................................................................Appendix- 4
Appendix 2.2 Parameter setting value entry table .......................................................................Appendix- 6
Appendix 2.3 Positioning data setting value entry table ............................................................Appendix- 12
Appendix 3 Positioning data (No. 1 to 600) List of buffer memory addresses...............................Appendix- 13
Appendix 4 Connection examples with servo amplifiers manufactured by MITSUBISHI Electric Corporation
.......................................................................................................................................Appendix- 37
Appendix 4.1 Connection example of QD75D
and MR-H A (Differential driver) ...............Appendix- 37
Appendix 4.2 Connection example of QD75D and MR-J2/J2S- A (Differential driver) .....Appendix- 38
Appendix 4.3 Connection example of QD75D
and MR-C A (Differential driver) ...............Appendix- 39
Appendix 5 Connection examples with stepping motors manufactured by ORIENTALMOTOR Co., Ltd.
.......................................................................................................................................Appendix- 40
Appendix 5.1 Connection example of QD75P
and VEXTA UPD (Open collector)................Appendix- 40
Appendix 6 Connection examples with servo amplifiers manufactured by Matsushita Electric Industrial Co.,
Ltd. ................................................................................................................................Appendix- 41
Appendix 6.1 Connection example of QD75D
and MINAS-A series (Differential driver)......Appendix- 41
Appendix 7 Connection examples with servo amplifiers manufactured by SANYO DENKI Co., Ltd.
.......................................................................................................................................Appendix- 42
Appendix 7.1 Connection example of QD75D
and PYO series (Differential driver)..............Appendix- 42
Appendix 8 Connection examples with servo amplifiers manufactured by YASKAWA Electric Corporation
.......................................................................................................................................Appendix- 43
Appendix 8.1 Connection example of QD75D
and Σ- series (Differential driver) .................Appendix- 43
Appendix 9 Comparisons with conventional positioning modules..................................................Appendix- 44
Appendix 9.1 Comparisons with A1SD71S2 model....................................................................Appendix- 44
Appendix 9.2 Comparisons with A1SD75P1-S3/A1SD75P2-S3/ A1SD75P3-S3 models.........Appendix- 45
Appendix 10 MELSEC Explanation of positioning terms................................................................Appendix- 68
Appendix 11 Positioning control troubleshooting............................................................................Appendix- 92
Appendix 12 List of buffer memory addresses.................................................................................Appendix-98
Appendix 13 External dimension drawing......................................................................................Appendix-107

A - 13
About Manuals
The following manuals are also related to this product.
In necessary, order them by quoting the details in the tables below.
Related Manuals
Manual Name
Manual Number
(Model Code)
Type QD75P/QD75D Positioning Module User's Manual
(Hardware)
Describes the performance, specifications, I/O interface, component names, and startup procedure of
the respective positioning modules: QD75P1, QD75P2, QD75P4, QD75D1, QD75D2, and QD75D4.
(The manual is supplied with the module.)
IB-0800063
(13JQ73)
GX Configurator-QP Operating Manual
Describes how to use GX Configurator-QP for the following and other purposes: creating data
(parameters, positioning data, etc.), sending the data to the module, monitoring the positioning
operations, and testing. (The manual is supplied with the software.)
SH-080172
(13JU19)
Using This Manual
The symbols used in this manual are shown below.
Pr.
........ Symbol indicating positioning parameter and OPR parameter item.
Da.
....... Symbol indicating positioning data, block start data and condition
data item.
Md.
....... Symbol indicating monitor data item.
Cd.
....... Symbol indicating control data item.
(A serial No. is inserted in the
mark.)
Representation of numerical values used in this manual.
Buffer memory addresses, error codes and warning codes are represented in
decimal.
X/Y devices are represented in hexadecimal.
Setting data and monitor data are represented in decimal or hexadecimal. Data
ended by "H" are represented in hexadecimal.
(Example) 10.........Decimal
10H......Hexadecimal
Conformation to the EMC AND LOW-VOLTAGE DIRECTIVES
For details on making Mitsubishi PLC conform to the EMC and Low Voltage
Directives when installing it in your product, please refer to Chapter 3, “EMC AND
LOW-VOLTAGE DIRECTIVES” of the using PLC CPU module User’s Manual
(Hardware).
The CE logo is printed on the rating plate on the main body of the PLC that
conforms to the
EMC and Low Voltage Directives
.
To make this product conform to the
EMC and Low Voltage Directives
, please
refer to Section 4.3.1 "Precautions for wiring".

A - 14
Generic Terms and Abbreviations
Unless specially noted, the following generic terms and abbreviations are used in this
manual.
Generic term/abbreviation Details of generic term/abbreviation
PLC CPU Generic term for PLC CPU on which QD75 can be mounted.
QD75 Generic term for positioning module QD75P1, QD75P2, QD75P4, QD75D1, QD75D2, and
QD75D4.
The module type is described to indicate a specific module.
Peripheral device Generic term for DOS/V personal computer that can run the following "GX Developer" and "GX
Configurator-QP".
GX Configurator-QP Abbreviation for GX Configurator-QP (SW2D5C-QD75P-E or later).
GX Developer Abbreviation for GX Developer (SW4D5C-GPPW-E or later).
Drive unit (servo amplifier) Abbreviation for pulse input compatible drive unit (servo amplifier).
Manual pulse generator Abbreviation for manual pulse generator (prepared by user).
DOS/V personal computer
IBM PC/AT
®
and compatible DOS/V compliant personal computer.
Personal computer Generic term for DOS/V personal computer.
Workpiece Generic term for moving body such as workpiece and tool, and for various control targets.
Axis 1, axis 2, axis 3,
axis 4
Indicates each axis connected to QD75.
1-axis, 2-axis, 3-axis,
4-axis
Indicates the number of axes. (Example: 2-axis = Indicates two axes such as axis 1 and axis 2,
axis 2 and axis 3, and axis 3 and axis 1.)

A - 15
Component List
The table below shows the component included in respective positioning modules:
Module name Description Quantity
QD75P1 QD75P1 Positioning Module(1-axis open collector output system) 1
QD75P2 QD75P2 Positioning Module(2-axes open collector output system) 1
QD75P4 QD75P4 Positioning Module(4-axes open collector output system) 1
QD75D1 Positioning Module(1-axis differential driver output system) 1
QD75D1
Differential driver common terminal 1
QD75D2 Positioning Module(2-axes differential driver output system) 1
QD75D2
Differential driver common terminal 1
QD75D4 Positioning Module(4-axes differential driver output system) 1
QD75D4
Differential driver common terminal 1

A - 16
MEMO

Section 1
Section 1 Product Specifications and Handling
Section 1 is configured for the following purposes (1) to (5).
(1) To understand the outline of positioning control, and the QD75 specifications
and functions
(2) To carry out actual work such as installation and wiring
(3) To set parameters and data required for positioning control
(4) To create a sequence program required for positioning control
(5) To understand the memory configuration and data transmission process
Read Section 2 for details on each control.
Chapter 1 Product outline .............................................................................................. 1- 1 to 1- 22
Chapter 2 System configuration .................................................................................... 2- 1 to 2- 6
Chapter 3 Specifications and Functions........................................................................ 3- 1 to 3- 24
Chapter 4 Installation, Wiring and Maintenance of the Product................................... 4- 1 to 4- 16
Chapter 5 Data Used for Positioning Control................................................................ 5- 1 to 5-132
Chapter 6 Sequence Program Used for Positioning Control........................................ 6- 1 to 6- 44
Chapter 7 Memory Configuration and Data Process.................................................... 7- 1 to 7- 12

MEMO
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279
-
 280
280
-
 281
281
-
 282
282
-
 283
283
-
 284
284
-
 285
285
-
 286
286
-
 287
287
-
 288
288
-
 289
289
-
 290
290
-
 291
291
-
 292
292
-
 293
293
-
 294
294
-
 295
295
-
 296
296
-
 297
297
-
 298
298
-
 299
299
-
 300
300
-
 301
301
-
 302
302
-
 303
303
-
 304
304
-
 305
305
-
 306
306
-
 307
307
-
 308
308
-
 309
309
-
 310
310
-
 311
311
-
 312
312
-
 313
313
-
 314
314
-
 315
315
-
 316
316
-
 317
317
-
 318
318
-
 319
319
-
 320
320
-
 321
321
-
 322
322
-
 323
323
-
 324
324
-
 325
325
-
 326
326
-
 327
327
-
 328
328
-
 329
329
-
 330
330
-
 331
331
-
 332
332
-
 333
333
-
 334
334
-
 335
335
-
 336
336
-
 337
337
-
 338
338
-
 339
339
-
 340
340
-
 341
341
-
 342
342
-
 343
343
-
 344
344
-
 345
345
-
 346
346
-
 347
347
-
 348
348
-
 349
349
-
 350
350
-
 351
351
-
 352
352
-
 353
353
-
 354
354
-
 355
355
-
 356
356
-
 357
357
-
 358
358
-
 359
359
-
 360
360
-
 361
361
-
 362
362
-
 363
363
-
 364
364
-
 365
365
-
 366
366
-
 367
367
-
 368
368
-
 369
369
-
 370
370
-
 371
371
-
 372
372
-
 373
373
-
 374
374
-
 375
375
-
 376
376
-
 377
377
-
 378
378
-
 379
379
-
 380
380
-
 381
381
-
 382
382
-
 383
383
-
 384
384
-
 385
385
-
 386
386
-
 387
387
-
 388
388
-
 389
389
-
 390
390
-
 391
391
-
 392
392
-
 393
393
-
 394
394
-
 395
395
-
 396
396
-
 397
397
-
 398
398
-
 399
399
-
 400
400
-
 401
401
-
 402
402
-
 403
403
-
 404
404
-
 405
405
-
 406
406
-
 407
407
-
 408
408
-
 409
409
-
 410
410
-
 411
411
-
 412
412
-
 413
413
-
 414
414
-
 415
415
-
 416
416
-
 417
417
-
 418
418
-
 419
419
-
 420
420
-
 421
421
-
 422
422
-
 423
423
-
 424
424
-
 425
425
-
 426
426
-
 427
427
-
 428
428
-
 429
429
-
 430
430
-
 431
431
-
 432
432
-
 433
433
-
 434
434
-
 435
435
-
 436
436
-
 437
437
-
 438
438
-
 439
439
-
 440
440
-
 441
441
-
 442
442
-
 443
443
-
 444
444
-
 445
445
-
 446
446
-
 447
447
-
 448
448
-
 449
449
-
 450
450
-
 451
451
-
 452
452
-
 453
453
-
 454
454
-
 455
455
-
 456
456
-
 457
457
-
 458
458
-
 459
459
-
 460
460
-
 461
461
-
 462
462
-
 463
463
-
 464
464
-
 465
465
-
 466
466
-
 467
467
-
 468
468
-
 469
469
-
 470
470
-
 471
471
-
 472
472
-
 473
473
-
 474
474
-
 475
475
-
 476
476
-
 477
477
-
 478
478
-
 479
479
-
 480
480
-
 481
481
-
 482
482
-
 483
483
-
 484
484
-
 485
485
-
 486
486
-
 487
487
-
 488
488
-
 489
489
-
 490
490
-
 491
491
-
 492
492
-
 493
493
-
 494
494
-
 495
495
-
 496
496
-
 497
497
-
 498
498
-
 499
499
-
 500
500
-
 501
501
-
 502
502
-
 503
503
-
 504
504
-
 505
505
-
 506
506
-
 507
507
-
 508
508
-
 509
509
-
 510
510
-
 511
511
-
 512
512
-
 513
513
-
 514
514
-
 515
515
-
 516
516
-
 517
517
-
 518
518
-
 519
519
-
 520
520
-
 521
521
-
 522
522
-
 523
523
-
 524
524
-
 525
525
-
 526
526
-
 527
527
-
 528
528
-
 529
529
-
 530
530
-
 531
531
-
 532
532
-
 533
533
-
 534
534
-
 535
535
-
 536
536
-
 537
537
-
 538
538
-
 539
539
-
 540
540
-
 541
541
-
 542
542
-
 543
543
-
 544
544
-
 545
545
-
 546
546
-
 547
547
-
 548
548
-
 549
549
-
 550
550
-
 551
551
-
 552
552
-
 553
553
-
 554
554
-
 555
555
-
 556
556
-
 557
557
-
 558
558
-
 559
559
-
 560
560
-
 561
561
-
 562
562
-
 563
563
-
 564
564
-
 565
565
-
 566
566
-
 567
567
-
 568
568
-
 569
569
-
 570
570
-
 571
571
-
 572
572
-
 573
573
-
 574
574
-
 575
575
-
 576
576
-
 577
577
-
 578
578
-
 579
579
-
 580
580
-
 581
581
-
 582
582
-
 583
583
-
 584
584
-
 585
585
-
 586
586
-
 587
587
-
 588
588
-
 589
589
-
 590
590
-
 591
591
-
 592
592
-
 593
593
-
 594
594
-
 595
595
-
 596
596
-
 597
597
-
 598
598
-
 599
599
-
 600
600
-
 601
601
-
 602
602
-
 603
603
-
 604
604
-
 605
605
-
 606
606
-
 607
607
-
 608
608
-
 609
609
-
 610
610
-
 611
611
-
 612
612
-
 613
613
-
 614
614
-
 615
615
-
 616
616
-
 617
617
-
 618
618
-
 619
619
-
 620
620
-
 621
621
-
 622
622
-
 623
623
-
 624
624
-
 625
625
-
 626
626
-
 627
627
-
 628
628
-
 629
629
-
 630
630
-
 631
631
-
 632
632
-
 633
633
-
 634
634
-
 635
635
-
 636
636
-
 637
637
-
 638
638
-
 639
639
-
 640
640
-
 641
641
-
 642
642
-
 643
643
-
 644
644
-
 645
645
-
 646
646
-
 647
647
-
 648
648
-
 649
649
-
 650
650
-
 651
651
-
 652
652
-
 653
653
-
 654
654
-
 655
655
-
 656
656
-
 657
657
-
 658
658
-
 659
659
-
 660
660
-
 661
661
-
 662
662
-
 663
663
-
 664
664
-
 665
665
-
 666
666
-
 667
667
-
 668
668
-
 669
669
-
 670
670
-
 671
671
-
 672
672
-
 673
673
-
 674
674
-
 675
675
-
 676
676
-
 677
677
-
 678
678
-
 679
679
-
 680
680
-
 681
681
-
 682
682
-
 683
683
-
 684
684
-
 685
685
-
 686
686
-
 687
687
-
 688
688
-
 689
689
-
 690
690
-
 691
691
-
 692
692
-
 693
693
-
 694
694
-
 695
695
-
 696
696
-
 697
697
-
 698
698
-
 699
699
-
 700
700
-
 701
701
-
 702
702
-
 703
703
-
 704
704
-
 705
705
-
 706
706
-
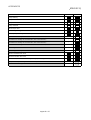 707
707
-
 708
708
-
 709
709
-
 710
710
-
 711
711
-
 712
712
-
 713
713
-
 714
714
-
 715
715
-
 716
716
-
 717
717
-
 718
718
-
 719
719
-
 720
720
-
 721
721
-
 722
722
-
 723
723
-
 724
724
-
 725
725
-
 726
726
-
 727
727
-
 728
728
-
 729
729
-
 730
730
-
 731
731
-
 732
732
-
 733
733
-
 734
734
-
 735
735
-
 736
736
-
 737
737
-
 738
738
-
 739
739
-
 740
740
-
 741
741
-
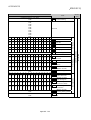 742
742
-
 743
743
-
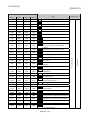 744
744
-
 745
745
-
 746
746
-
 747
747
-
 748
748
-
 749
749
-
 750
750
-
 751
751
-
 752
752
-
 753
753
-
 754
754
-
 755
755
-
 756
756
-
 757
757
-
 758
758
-
 759
759
-
 760
760
-
 761
761
-
 762
762
-
 763
763
-
 764
764
-
 765
765
-
 766
766
-
 767
767
-
 768
768
































































































































































































































































































































































































































































































































































































































































































































































































Mitsubishi Electronics QD75P User manual
- Type
- User manual
- This manual is also suitable for
Ask a question and I''ll find the answer in the document
Finding information in a document is now easier with AI
Related papers
-
Mitsubishi Electric QD75MH1 User manual
-
 Mitsubishi Electronics QD75MH1 User manual
Mitsubishi Electronics QD75MH1 User manual
-
Mitsubishi SW0D5C-QD75P-E User manual
-
Mitsubishi Electronics Home Security System QD77MS2 User manual
-
-
Mitsubishi Electronics AJ65BT-D75P2-S3 User manual
-
 Mitsubishi Electronics MELSEC Q series MELSEC L series User manual
Mitsubishi Electronics MELSEC Q series MELSEC L series User manual
-
 Mitsubishi Electronics Universal Remote QD73A1 User manual
Mitsubishi Electronics Universal Remote QD73A1 User manual
-
 Mitsubishi Electronics FX3U User manual
Mitsubishi Electronics FX3U User manual
-




Other documents
-
-
Mitsubishi Electric MELSEC iQ-R Positioning Module User manual
-
-
-
-
 LS Industrial Systems XBF-PD02A User manual
LS Industrial Systems XBF-PD02A User manual
-
-
-
 Nissei Controller/Teaching pendant User manual
Nissei Controller/Teaching pendant User manual
-

