
BOOK 0958-B
Series 2330MKII
Single-Phase
Adjustable-Speed
DC Motor Controllers
(1/6 – 3 HP)
Control Techniques
3750 East Market Street
York, PA 17402-2798
717-751-4200, FAX 717-751-4263
www.fincor.net


BOOK 0958-B
SERIES 2330 MKII
SINGLE-PHASE
ADJUSTABLE-SPEED
DC MOTOR CONTROLLERS
(1/6 - 3 HP)
Control Techniques
3750 E Market Street
York, PA 17402-2798
USA
Tel 717.751.4200
Fax 717.751.4263
www.fincor.net

BOOK 0958-B

BOOK 0958-B
iii
TABLE OF CONTENTS
SECTION TITLE PAGE
I .......................................... GENERAL INFORMATION ...................................................................1
Introduction ...............................................................................................1
General Description...................................................................................1
Model Types..............................................................................................1
Motor Selection .........................................................................................2
II.......................................... INSTALLATION......................................................................................3
Installation Guidelines...............................................................................3
Installing the Controller ............................................................................5
Initial Startup...........................................................................................17
III ......................................... OPERATION ..........................................................................................19
Power On/Off ..........................................................................................19
Run ..........................................................................................................19
Stop .........................................................................................................19
Speed Control..........................................................................................20
Torque Control ........................................................................................20
Jog ...........................................................................................................20
Reverse....................................................................................................21
Load Monitor (Motor Timed Overload)..................................................21
Current Loop Transducers.......................................................................21
Inoperative Motor....................................................................................21
IV ......................................... MAINTENANCE AND REPAIR...........................................................23
General ....................................................................................................23
Adjustment Instructions ..........................................................................23
Troubleshooting Instructions...................................................................25
V.......................................... PARTS LIST ...........................................................................................29
VI ......................................... RATINGS AND SPECIFICATIONS .....................................................31
Ratings.....................................................................................................31
Operating Conditions ..............................................................................32
Performance Characteristics....................................................................32
Adjustments.............................................................................................33
Specifications ..........................................................................................33
VII ........................................ DRAWINGS ...........................................................................................35
INDEX ....................................................................................................39

BOOK 0958-B
iv
LIST OF TABLES
TABLE TITLE PAGE
1................... Series 2330 MKII Model Matrix...........................................................................................1
2................... Jumper J4 Position........................................................................................................................5
3.................... Dip Switch (SW3) ........................................................................................................................6
4.................... Initial Potentiometer Settings.....................................................................................................17
5.................... Dynamic Braking Characteristics ..............................................................................................20
6.................... Troubleshooting.................................................................................................................... 25-28
7.................... Parts List, Series 2330 MKII Controllers ..................................................................................29
8.................... Typical Application Data ...........................................................................................................31
9.................... Operating Voltages and Signals.................................................................................................32
10................... Controller Weights .....................................................................................................................32
11................... Speed Regulation Characteristics...............................................................................................33
12................... Shunt Field Data.........................................................................................................................33
13................... Tachometer Feedback Voltage Selection ..................................................................................34
LIST OF ILLUSTRATIONS
FIGURE
TITLE PAGE
1................... Controller Mounting Configurations .....................................................................................7
2................... Controller Mounting Dimensions ................................................................................................8
3.................... Logic Connection Diagram, Run-Stop-Jog Switch.....................................................................9
4.................... Logic Connection Diagram, Forward-Reverse Switch and Run-Stop-Jog Switch ....................9
5.................... Logic Connection Diagram, Run-Stop Pushbuttons and Run-Jog Switch ...............................10
6.................... Logic Connection Diagram, Run-Stop-Controlled Stop Pushbuttons and Run-Jog Switch....10
7.................... Logic Connection Diagram, Optional Unidirectional Contactor Using Run-Jog Switch ........11
8.................... Logic Connection Diagram, Optional Unidirectional Contactor Using Run-Stop .................11
Pushbuttons and Run-Jog Switch
9.................... Logic Connection Diagram, Optional Armature Contactor Reversing Using Switches..........12
10................... Logic Connection Diagram, Optional Armature Contactor Reversing Using Pushbuttons ....12
and Run-Jog Switch
11................... Logic Connection Diagram, Line Starting With Motor Speed Potentiometer .........................13
12................... Signal Connection Diagram, Motor Speed Potentiometer........................................................13
13................... Signal Connection Diagram, Tachometer Feedback.................................................................14
14................... Signal Connection Diagram, Current (Torque) Reference Potentiometer................................14
15................... Signal Connection Diagram, Line Starting Without a Motor Speed Potentiometer ................14
16................... Signal Connection Diagram, 4-20mA Interface........................................................................15
17................... Signal Connection Diagram, 4-20mA Transducer with Auto/Manual Switch ........................15
18.................. Signal Connection Diagram, Transducer with External Burden Resistor................................15
19................... Functional Schematic, Series 2330 MKII .................................................................................36
20................... Series 2330 MKII Control Board, 1/6 – 3HP............................................................................37

BOOK 0958-B
v
Blank Page

BOOK 0958-B
vi
WARNING
The following must be strictly adhered to at all times.
1. YOU AS THE OWNER OR OPERATOR OF FINCOR EQUIPMENT HAVE THE RESPONSIBILITY
TO HAVE THE USERS OF THIS EQUIPMENT TRAINED IN ITS OPERATIONS AND WARNED OF ANY
POTENTIAL HAZARDS OF SERIOUS INJURY.
2. THE DRIVE EQUIPMENT SHOULD BE INSTALLED, OPERATED, ADJUSTED, AND SERVICED
ONLY BY QUALIFIED PERSONNEL FAMILIAR WITH THE CONSTRUCTION AND OPERATION
OF THE EQUIPMENT AND THE HAZARDS INVOLVED INCLUDING THOSE DESCRIBED
BELOW. FAILURE TO OBSERVE THIS WARNING CAN RESULT IN PERSONAL INJURY, LOSS OF LIFE,
AND PROPERTY DAMAGE.
3. THE NATIONAL ELECTRICAL CODE REQUIRES THAT AN AC LINE FUSED DISCONNECT OR
CIRCUIT BREAKER BE PROVIDED IN THE AC INPUT POWER LINES TO THE CONTROLLER. THIS
DISCONNECT MUST BE LOCATED WITHIN SIGHT OF THE CONTROLLER. DO NOT OPERATE
THE CONTROLLER UNTIL THIS CODE REQUIREMENT HAS BEEN MET.
4. THE DRIVE EQUIPMENT IS AT AC LINE VOLTAGE WHENEVER AC POWER IS CONNECTED TO
THE DRIVE EQUIPMENT. CONTACT WITH AN ELECTRICAL CONDUCTOR INSIDE THE DRIVE
EQUIPMENT OR AC LINE DISCONNECT CAN CAUSE ELECTRIC SHOCK RESULTING IN
PERSONAL INJURY OR LOSS OF LIFE.
5. BE SURE ALL AC POWER IS DISCONNECTED FROM THE DRIVE EQUIPMENT BEFORE
TOUCHING ANY COMPONENT, WIRING, TERMINAL, OR ELECTRICAL CONNECTION IN THE
DRIVE EQUIPMENT.
6. ALWAYS WEAR SAFETY GLASSES WHEN WORKING ON THE DRIVE EQUIPMENT.
7. DO NOT REMOVE OR INSERT CIRCUIT BOARDS, WIRES, OR CABLES WHILE AC POWER IS
APPLIED TO THE DRIVE EQUIPMENT. FAILURE TO OBSERVE THIS WARNING CAN CAUSE
DRIVE DAMAGE AND / OR PERSONAL INJURY.
8. ALL DRIVE EQUIPMENT ENCLOSURES, MOTOR FRAMES, AND REMOTE OPERATOR
STATIONS MUST BE CONNECTED TO AN UNBROKEN COMMON GROUND CONDUCTOR. AN
UNBROKEN GROUNDING CONDUCTOR MUST BE RUN FROM THE COMMON GROUND
CONDUCTOR TO A GROUNDING ELECTRODE BURIED IN THE EARTH OR ATTACHED TO A
PLANT GROUND. REFER TO THE NATIONAL ELECTRICAL CODE AND LOCAL CODES FOR
GROUNDING REQUIREMENTS.
9. THE ATMOSPHERE SURROUNDING THE DRIVE EQUIPMENT MUST BE FREE OF COMBUSTIVE
VAPORS, CHEMICAL FUMES, OIL VAPOR, AND ELECTRICALLY CONDUCTIVE OR CORROSIVE
MATERIALS.
10. SOLID-STATE DEVICES IN THE CONTROLLER CAN BE DESTROYED OR DAMAGED BY
STATIC ELECTRICITY. THEREFORE, PERSONNEL WORKING NEAR THESE STATICSENSITIVE
DEVICES MUST BE APPROPRIATELY GROUNDED.

BOOK 0958-B
1
SECTION I
GENERAL INFORMATION
INTRODUCTION
This manual contains installation, operation, and maintenance and repair instructions for Fincor Series 2330 MKII
Single-Phase Adjustable-Speed DC Motor Controllers. A parts list, ratings and specifications, and drawings are also
included.
GENERAL DESCRIPTION
Series 2330 MKII Controllers statically convert AC line power to regulated DC for adjustable-speed armature
control of shunt-wound and permanent-magnet motors.
Series 2330 MKII Controllers comply with applicable standards established by the National Electrical Code and NEMA
for motor and industrial control equipment. The controllers are Underwriters Laboratories Listed (File No. E184521)
UL/cUL.
MODEL TYPES
TABLE 1. SERIES 2330 MKII MODEL MATRIX
FUNCTION CONFIGURATION OPERATOR CONTROLS
POWER
SOURCE
a
&
HP RANGE
MODEL
RUN
STOP
b
RUN-
STOP-
DB
c
ARMATURE
SWITCH
REVERSE
b
ARMATURE
CONTACT
AND DB
c
ARMATURE
CONTACT
REVERSE
AND DB
c
OPEN
CHASSIS
ENCLOSED
LOCAL
INTEGRAL
REMOTE 115V 230V
2331
2335
X X X
2331P0 X X X
2331P1 X X X
2331P2 X X X
2331A
2335A
X X X X
2331AP0 X X X X
2331AP3 X
X
d
X X
2331B X X X X
2311BP0 X X X X
2331BP1 X X X X
1/6-1 1/3-2
2332
2336
X X X
2332A
2336A
X X X X
2332B X X X X
1/6-1 1/3-3
a. Units are reconnectable c. Includes armature contactor
b. No armature contactor d. Includes Forward/Reverse switch

BOOK 0958-B
2
MOTOR SELECTION
Series 2330MKII Controllers control the operation of general purpose DC motors designed for use with solid-state
rectified power supplies. The motor may be shunt-wound, stabilized shunt-wound, or permanent magnet. For
maximum efficiency, the motor should be rated for operation from a NEMA Code K power supply.

BOOK 0958-B
3
SECTION II
INSTALLATION
Before starting the installation, read this section thoroughly. In addition, a thorough review of the Ratings and
Specifications (Section VI) is recommended. The following installation guidelines should be kept in mind when
installing the controller.
INSTALLATION GUIDELINES
1. CONTROLLER MOUNTING - The controller may be mounted either vertically or horizontally. However, never
mount the controller upside down, immediately beside or above heat generating equipment, or directly below water or
steam pipes.
The controller must be mounted in a location free of vibration.
Multiple controllers may be mounted side by side, as close to each other as the mounting feet will allow.
The minimum clearance at the top and bottom of the controller may be as narrow as the conduit fittings allow.
2. ATMOSPHERE - The atmosphere surrounding the controller must be free of combustible vapors, chemical fumes,
oil vapor, and electrically conductive or corrosive materials.
The air surrounding an enclosed controller must not exceed 40 degrees C (104 degrees F), and the air surrounding an
open-chassis controller must not exceed 55 degrees C (131 degrees F). Minimum air temperature is 0 degree C (32
degrees F) for enclosed and open-chassis controllers.
3. CONTROLLER CONSTRUCTION - The controller base is made of die-cast aluminum with a powdered epoxy
finish, and the cover is made of a die-cast aluminum alloy.
The controller enclosure is totally enclosed, non-ventilated, and complies with NEMA Type 4 and 12 standards. There
is an oil resistant synthetic rubber gasket between the cover and base. Those models with integral operator controls
include flexible boots to seal the switches, and a seal for the MOTOR SPEED potentiometer.
4. LINE SUPPLY - The controller should not be connected to a line supply capable of supplying more than 100,000
amperes short-circuit current. Short-circuit current can be limited by using an input supply transformer of 50 KVA or
less, or by using correctly sized current limiting fuses in the supply line ahead of the controller. Do not use a
transformer with less than the minimum transformer KVA listed in Table 8, page 31.
If rated line voltage is not available, a line transformer will be required. If the line supply comes directly from a
transformer, place a circuit breaker or disconnect switch between the transformer secondary and the controller. If power
is switched in the transformer primary, transients may be generated which can damage the controller. See Table 8 (page
31) for minimum transformer KVA.
Do not use power factor correction capacitors on the supply line to the controller.
A 20 Joule metal oxide varistor (MOV) is connected across the controller terminals. If higher energy transients are
present on the line supply, additional transient suppression will be required to limit transients to 150% of peak line
voltage.
When a 115 VAC line supply is used, connect the white (common) wire to Terminal L2 and connect the remaining
(hot) wire to Terminal L1.

BOOK 0958-B
4
5. ISOLATION TRANSFORMER - While not required, an isolation transformer can provide the following
advantages:
a. Reduce the risk of personal injury if high voltage drive circuits are accidentally touched.
b. Provide a barrier to externally generated AC supply transients. This can prevent controller damage from abnormal
line occurrences.
c. Reduce the potential for damaging current if the motor armature, motor field, or motor wiring becomes grounded.
6. GROUNDING - Connect the green or bare (ground) wire of the line supply to the ground screw located near the top
conduit entry hole in the controller base. Then ground the controller base by connecting the ground screw to earth
ground.
The motor frame and operator control stations must also be grounded.
Personal injury may occur if the controller, motor, and operator stations are not properly grounded.
7. WIRING PRACTICES - The power wiring must be sized to comply with the National Electrical Code, CSA, or
local codes. Refer to the controller data label for line and motor current ratings.
Do not use solid wire.
Signal wiring refers to wiring for potentiometers, tachometer generators, and transducers. Control wiring refers to
wiring for operator controls, e.g., switches and pushbuttons. Signal and control wiring may be run in a common
conduit, but not in the same conduit as the power wiring. In an enclosure, signal and control wiring must be kept
separated from power wiring and only cross at a 90 degree angle to reduce electrical noise.
If shielded wire (such as Alpha 2422 - two conductor, 2423 - three conductor, 2424 - four conductor) is used for the
signal and control wiring, connect the shields to chassis ground (ground screw on the controller base) and tape the
opposite ends of the shields. Twisted cable is also suitable for signal and control wiring.
Two 3/4-14 NPT threaded holes are provided for conduit entry, one each in the top and bottom of the controller.

BOOK 0958-B
5
INSTALLING THE CONTROLLER
1. Remove the controller front cover (if used) by removing the four cover screws.
2. Check components in the controller for shipping damage. Report shipping damage to the carrier.
3. Check the controller and motor data labels to be sure the units are electrically compatible.
4. Be sure the controller has been calibrated correctly for the motor being used. Calibration is performed by
changing the position of a Jumper J4 on the controller control board to comply with Table 2. To change the position
of Jumper J4, pull the jumper from the control board and then push it onto the appropriate two pins on the board. For
the location of J4, see Figure 20 (page 37).
TABLE 2. JUMPER J4 POSITION
MOTOR ARMATURE CURRENT RATING (AMPERES)
JUMPER
POSITION
a
2 HP Maximum 3 HP Maximum
100% 10 15
80% 8 12
60% 6 9
40% 4 6
20% 2 3
a. Select the position closest to the motor nameplate armature current rating.
5. Check the positions of Jumpers J1, J2, and J3 on the control board. For the locations of J1, J2, and J3, see Figure 20,
page 37. For a 230 VAC line supply and a 180V armature motor, Jumper J1 must be in the 230V position, and Jumpers
J2 and J3 must be in the 180V position. For a 115 VAC line supply and a 90V armature motor, J1 must be in the
115V position, and J2 and J3 must be in the 90V position. To change the position of J1, J2, or J3 pull the jumper
from the control board and then push it onto the appropriate pins on the board.
NOTE: If Option 1001 (Armature Contactor, Unidirectional), 1004 (Armature Contactor, Reversing), or 1775 (Signal
Interface) is to be installed in the controller, do not offset the five-position plug (supplied with the option) at Connector
J1 on the control board. Do not confuse Connector J1 with Jumper J1. Refer to the Instruction Sheet (ISP0703,
ISP0666, ISP0653, respectively) supplied with the option for connection instructions.
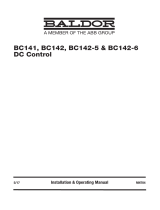
6. The controller may be surface mounted or panel mounted as shown in Figure 1, page 7. Mount the controller.
Mounting dimensions are shown in Figure 2, page 8.
7. Conduit entry is made by punching out the knockout at the top or bottom of the controller base. To prevent
component damage from knockout fragments, apply masking tape to the inside of the knockout before punching.
8. Connect the power wiring to Terminals L1, L2, A1 (+), A2 (-), F+ and F-. Be sure to observe Installation Guidelines
4 and 7 on pages 3 and 4. If half-wave shunt field voltage is desired, connect one of the motor shunt field leads to
Terminal F/2 (see Table 12 on page 33).
NOTE: Low inductance motors require a full-wave field to prevent current instability.

BOOK 0958-B
6
9. If the controller contains any options that require external wiring, follow the wiring instructions in the instruction
sheet supplied with the option.
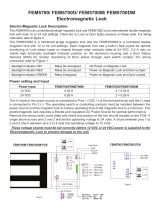
10. If remote operator control wiring and/or signal wiring is required, connect the controller as shown in the appropriate
connection diagram (Figures 3 through 18). Figures 3 through 11 show operator control connections, and Figures 12
through 18 show signal connections.
11. The controller can be programmed for various applications by throwing switches on dip switch SW3
TABLE 3. DIP SWITCH (SW3)
FACTORY DEFAULT SETTING IS ALL SWITCHES “ON”
Switch Position
1
ON
OFF
Low voltage (3Vdc - 30Vdc) tachometer scaling
High voltage (31 Vdc - 175Vdc) tachometer scaling.
2
ON
OFF
Selects internal burden resistor for 4-20ma input.
Selects 0 to 5V speed reference input or external burden resistor
(i.e. 10 to 50ma)
3
ON
OFF
Selects internal current (torque) reference pot.
Selects use of an external current (torque) reference pot.
4
ON
OFF
Selects Min Speed pot adjustment.
Selects Offset adjustment (for 4-20ma input) with Min Speed pot.
5
ON
OFF
Selects anti-restart mode. Prevents controller from restarting
automatically after an AC line power interruption.
Disables anti-restart mode. Used for line starting applications
(jumper TB2:9 to TB2:8 to enable drive).
12. Install the controller cover, if used.

BOOK 0958-B
7
FIGURE 1. CONTROLLER MOUNTING CONFIGURATIONS

BOOK 0958-B
8
FIGURE 2. CONTROLLER MOUNTING DIMENSIONS

BOOK 0958-B
9
Figure 3. Logic connection diagram, Run-Stop-Jog Switch
Figure 4. Logic connection diagram, Forward-Reverse Switch and Run-Stop-Jog Switch

BOOK 0958-B
10
Figure 5. Logic connection diagram, Run-Stop Pushbuttons and Run-Jog Switch
Figure 6. Logic connection diagram, Run-Stop-Controlled Stop Pushbuttons and
Run-Jog Switch

BOOK 0958-B
11
Figure 7. Logic connection diagram, Optional Unidirectional Contactor using Run-Jog Switch
Figure 8. Logic connection diagram, Optional Unidirectional Contactor using Run-Stop
Pushbuttons and Run-Jog Switch

BOOK 0958-B
12
Figure 9. Logic connection diagram, Optional Armature Contactor Reversing using
Switches
Figure 10. Logic connection diagram, Optional Armature Contactor Reversing using
Pushbuttons and Run-Jog Switch
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
Page is loading ...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50


















































Emerson 2330MKII User manual
- Type
- User manual
- This manual is also suitable for
Ask a question and I''ll find the answer in the document
Finding information in a document is now easier with AI
Related papers
Other documents
-
 American Control Electronics LGC440-1 User manual
American Control Electronics LGC440-1 User manual
-
 Baldor-Reliance BC141, BC142, BC142-5 & BC142-6 DC Control Owner's manual
Baldor-Reliance BC141, BC142, BC142-5 & BC142-6 DC Control Owner's manual
-
ACE RGH100-5-FLD Quick start guide
-
 Baldor-Reliance BC203 Regenerative Drive Adjustable Speed DC Control Owner's manual
Baldor-Reliance BC203 Regenerative Drive Adjustable Speed DC Control Owner's manual
-
Baldor IP-65 User manual
-
 FSH FEM5700DM Technical Manual
FSH FEM5700DM Technical Manual
-
ICM Controls ICM495 User guide
-
KB Electronics KBAC Run-Stop-Jog Switch Kit Owner's manual
-
ICM Controls ICM495-30A User guide
-



