Page is loading ...

Baumer IVO GmbH & Co. KG
Dauchinger Strasse 58-62
DE-78056 Villingen-Schwenningen
Phone +49 (0)7720 942-0
Fax +49 (0)7720 942-900 05.11 · 174.01.051/4
[email protected] Irrtum sowie Änderungen in
www.baumer.com Technik und Design vorbehalten.
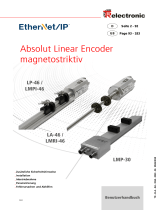
Handbuch
GK473 - Gateway RS485 - DeviceNet
Firmware Version ab 1.01
Gültig für:
Spindelpositionsanzeigen N 140 / N 141 / N 142 / N 143 / N 150 / N 152 / 153 / N 155

Handbuch_GK473_DeviceNet_DE.doc 2/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
Inhalt Seite
1 Einleitung 3
1.1 Lieferumfang 3
1.2 Produktzuordnung 3
2 Übersicht 3
3 Sicherheits- und Betriebshinweise 4
4 Inbetriebnahme 5
4.1 Mechanische Montage 5
4.2 Elektrischer Anschluss 5
4.2.1 Elektrische Inbetriebnahme 5
4.2.2 Anschluss der Betriebsspannung 5
4.2.3 Anschluss der Schirmung / Funktionserde 5
4.2.4 Anschluss DeviceNet - RS485-Bus 6
4.3 Geräteeinstellungen 7
4.3.1 Öffnen des Gehäuses 7
4.3.2 Einstellen der DeviceNet Teilnehmeradresse (Mac ID) 7
4.3.3 Einstellen der Baudrate 7
4.3.4 Einstellen des DeviceNet Abschlusswiderstands 8
4.3.5 EDS-Datei 8
5 Schnittstellenbeschreibung DeviceNet 9
5.1 Datenaustausch DeviceNet Master <-> Slave 9
5.2 Datenaustausch DeviceNet <-> RS485-Subbus 9
6 DeviceNet CIP Object Implementation 10
7 GK473 Object, Class 0x64 15
7.1 Attribute 1: Autoscan SPA 16
7.2 Attribute 2: Transfer SPA Kommando transparent 17
7.3 Attribute 3: RS485 Subbus, SPA Status Information komplett 19
7.4 Attribute 4: Sammelinformation Angeschlossene SPA 21
7.5 Attribute 5: Sammelinformation SPA nicht in Position 22
7.6 Attribute 6: Sammelinformation SPA in Error Status 23
7.7 Attribute 7: Sammelinformation SPA in Timeout Status 24
8 Allgemeines 25
8.1.1 Broadcast-Befehle 25
8.1.2 Schnittstellendokumentation 25
8.2 Automatische Gateway Funktionen 25
8.2.1 Automatische Erkennung der SPA 25
8.2.2 Ständige Abfrage aller angeschlossenen SPA (Scannen) 25
8.2.3 Fehlermeldungen 25
8.3 Anzeigeelemente in der Frontplatte (LED´s) 26
8.4 Technische Daten 28
9 Anhang: Rockwell PLC Beispiele zum Explicit Messaging 29
9.1 RSLogix500 Beispiele 29

Handbuch_GK473_DeviceNet_DE.doc 3/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
Haftungsausschluss
Diese Schrift wurde mit grosser Sorgfalt zusammengestellt. Fehler lassen sich jedoch nicht immer vollständig
ausschliessen. Baumer IVO GmbH & Co. KG übernimmt daher keine Garantien irgendwelcher Art für die in
dieser Schrift zusammengestellten Informationen. In keinem Fall haftet Baumer IVO GmbH & Co. KG oder
der Autor für irgendwelche direkten oder indirekten Schäden, die aus der Anwendung dieser Informationen
folgen.
Wir freuen uns jederzeit über Anregungen, die der Verbesserung dieses Handbuchs dienen können.
1 Einleitung
1.1 Lieferumfang
Bitte prüfen Sie vor der Inbetriebnahme die Vollständigkeit der Lieferung.
Je nach Ausführung und Bestellung können zum Lieferumfang gehören:
• Schnittstellenwandler
• CD mit Beschreibungsdateien und Handbuch (auch über das Internet zum Download verfügbar)
1.2 Produktzuordnung
Produkt Produkt-Code Device Name Eds-Datei Produktfamilie
GK473.0078PDx 0x2D GK473 DeviceNet GK473_DN.eds multicon
2 Übersicht
Das Gateway GK473 (Schnittstellenwandler) verbindet Spindelpositionsanzeigen (SPA) des Baumer IVO
Multicon Systems (z.B. N 140 / N 142 / N 150) mit einer DeviceNet-fähigen Speicherprogrammierbaren
Steuerung (SPS). Das Gateway setzt die Datensätze der RS485-Schnittstelle der SPA auf das DeviceNet
Protokoll um (und umgekehrt).
Eigene Funktionen des Gateways erleichtern und vereinfachen die Programmierung der SPS erheblich.
Das Gateway ermöglicht den Anschluss von bis zu 32 SPA an den DeviceNet Feldbus. Das Gateway ist für
alle Spindelpositionsanzeigen der multicon Familie verwendbar.
SPS
SPA
N 140,
N 141,
N 142,
N 150,
N 155
GK473

Handbuch_GK473_DeviceNet_DE.doc 4/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
3 Sicherheits- und Betriebshinweise
Zusätzliche Informationen
• Das Handbuch ist eine Ergänzung zu bereits vorhandenen Dokumentationen (Katalog, Datenblatt und
Montageanleitung).
• Das Handbuch muss unbedingt vor Inbetriebnahme gelesen werden.
Bestimmungsgemäßer Gebrauch
• Das Gateway ist ein Schnittstellenwandler / Umsetzer zwischen einer seriellen RS485 Schnittstelle und
DeviceNet. Es beinhaltet spezielle Anpassungen für das Baumer IVO Multicon Spindelpositionierungs-
System. Das Gateway darf ausschließlich zu diesem Zweck verwendet werden.
Inbetriebnahme
• Einbau und Montage des Gateways darf ausschließlich durch eine Fachkraft erfolgen.
• Betriebsanleitung des Maschinenherstellers beachten.
Sicherheitshinweise
• Vor Inbetriebnahme der Anlage alle elektrischen Verbindungen überprüfen.
• Wenn Montage, elektrischer Anschluss oder sonstige Arbeiten am Gateway und an der Anlage nicht
fachgerecht ausgeführt werden, kann es zu Fehlfunktion oder Ausfällen des Gateways führen.
• Eine Gefährdung von Personen, eine Beschädigung der Anlage und eine Beschädigung von
Betriebseinrichtungen durch den Ausfall oder Fehlfunktion des Gateways muss durch geeignete
Sicherheitsmaßnahmen ausgeschlossen werden.
• Das Gateway darf nicht außerhalb der Grenzwerte betrieben werden, welche in der Produktinformation
angegeben sind.
Bei Nichtbeachtung der Sicherheitshinweise kann es zu Fehlfunktionen, Sach- und Personenschäden
kommen.
Transport und Lagerung
• Transport und Lagerung ausschließlich in Originalverpackung.
• Gateway nicht fallen lassen oder größeren Erschütterungen aussetzen.
Montage
• Schläge oder Schocks auf Gehäuse vermeiden.
Entsorgung
• Bestandteile nach länderspezifischen Vorschriften entsorgen.

Handbuch_GK473_DeviceNet_DE.doc 5/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
4 Inbetriebnahme
4.1 Mechanische Montage
Das Gateway ist in einem schmalen Gehäuse für Hutschienen-Montage untergebracht. Es lässt sich mit
einem kleinen Schlitz-Schraubendreher leicht öffnen und danach teilweise heraus ziehen, um Einstellungen
der Bus-Knoten-Adresse (MAC ID), der Baudrate und des Abschlusswiderstands vorzunehmen.
• Rasterbreite 22,5 mm, Höhe ca. 100 mm und Tiefe ca. 110 mm
• für 35 mm DIN-Hutschienen-Montage
Zur Montage auf der DIN-Hutschiene wird das Gateway auf der Rückseite oben in die Hutschiene eingehängt
und anschließend heruntergedrückt, bis der Verschluss einrastet.
4.2 Elektrischer Anschluss
4.2.1 Elektrische Inbetriebnahme
• Gateway elektrisch nicht verändern.
• Keine Verdrahtungsarbeiten unter Spannung vornehmen.
• Die gesamte Anlage EMV gerecht installieren. Einbauumgebung und Verkabelung beeinflussen die EMV
des Gateway. Gateway und Zuleitungen räumlich getrennt oder in großem Abstand zu Leitungen mit
hohem Störpegel (Frequenzumrichter, Schütze, usw.) verlegen.
• Bei Verbrauchern mit hohen Störpegeln separate Spannungsversorgung für den Gateway bereitstellen.
• Gateway an Schutzerde (PE) anschließen. Geschirmte Kabel verwenden. Schirmgeflecht muss mit der
Kabelverschraubung oder Stecker verbunden sein. Anzustreben ist ein beidseitiger Anschluss an
Schutzerde (PE), Gehäuse über den mechanischen Anbau, Kabelschirm über die nachfolgenden
angeschlossenen Geräte. Bei Problemen mit Erdschleifen mindestens eine einseitige Erdung.
Bei Nichtbeachtung kann es zu Fehlfunktionen, Sach- und Personenschäden kommen.
4.2.2 Anschluss der Betriebsspannung
Der Anschluss der Betriebsspannung für Gateway und SPA erfolgt an den Schraubklemmen 5 (GNDB) und 6
(UB) oder an den Schraubklemmen 7 (GNDB) und 8 (UB). Die Klemmen 5 und 7 sowie 6 und 8 sind intern
miteinander verbunden, so dass die Betriebsspannung an weitere Verbraucher (z.B. an die SPA)
durchgeschleift werden kann.
4.2.3 Anschluss der Schirmung / Funktionserde
Die Schutzerde kann an Klemme 1 angeschlossen werden. Dies ist gleichzeitig der Anschluss für die
Schirmung des RS485 Busses. Es besteht eine Verbindung zu Pin 1 und zum Gehäuse des 9-poligen SUB-D
Steckverbinders (DeviceNet).
Die Verbindung zur Schutzerde wird zusätzlich über die DIN-Hutschienenbefestigung hergestellt. Die
Hutschiene muss, um diesen Zweck zu erfüllen, daher niederohmig mit der Funktionserde verbunden sein.
Um die interne Drain- Beschaltung gegen Erde nicht zu überbrücken, darf der DeviceNet Drain Anschluss
bzw. die Schirmung des DeviceNet Kabels nicht mit dem SUB-D Steckergehäuse verbunden werden.

Handbuch_GK473_DeviceNet_DE.doc 6/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
4.2.4 Anschluss DeviceNet - RS485-Bus
DeviceNet
Anschluss über 9 pol. SUB-D Buchse
PIN Funktion
1
2 CAN _L
3
4
5
6
7 CAN_H
8 Drain
9
RS485
Anschluss über Schraubklemmen
Die Verbindung zur Schutzerde
wird zusätzlich über die DIN-
Hutschienenbefestigung hergestellt.
Als Spannungsversorgung für das
Gateway ist vorzusehen
UB = 24 VDC +/-20 %, ca.50 mA;
Zusätzlich wird je
Spindelpositionsanzeige
UB = 24 VDC +/-20 %, 30 mA
benötigt.
Die Versorgung des Gateways
erfolgt über die UB/GNDB
Versorgung der RS485 Seite.
Klemme Nr. Funktion
1 Schutzerde
2 Signal-GND
3 Rx/Tx +
4 Rx/Tx –
5 GNDB
6 UB
7 GNDB
8 UB
1
2
3
4
5
6
7
8

Handbuch_GK473_DeviceNet_DE.doc 7/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
4.3 Geräteeinstellungen
4.3.1 Öffnen des Gehäuses
Schnappverschluss
Zum Einstellen der Teilnehmeradresse (Mac ID) und der Baudrate ist es erforderlich, das Gehäuse des
Gateway teilweise zu öffnen. Verwenden Sie hierfür einen kleinen Schlitz-Schraubendreher. Nach dem
Eindrücken der Schnappverschlüsse oben und unten hinter den Schraubklemmen, lässt sich das Gehäuse
bis zu einem Anschlag halb herausziehen, so dass die Bedienelemente zugänglich werden. Das Gehäuse
wird wieder geschlossen, indem man es bis zum Einrasten beider Schnappverschlüsse in die
Ursprungsposition zurückschiebt.
4.3.2 Einstellen der DeviceNet Teilnehmeradresse (Mac ID)
Die DeviceNet Teilnehmeradresse lässt sich über zwei BCD-Drehschalter dezimal im Bereich von 00 bis 63
einstellen. (Bei Einstellung grösser 63 wird automatisch 63 zugewiesen)
Werkseinstellung : Mac ID 63
Beispiel: 01
4.3.3 Einstellen der Baudrate
Die Einstellung der Baudrate erfolgt binär über Schalter 1 bis 3 des 3-poligen DIP Schalters.
Werkseinstellung : Baudrate 125kBit/s
Baudrate Einstellung DIP Schalter
1 2 3
125 kBit/s
OFF OFF OFF
250 kBit/s OFF OFF ON
500 kBit/s OFF ON OFF
Beispiel: 500KBit/s

Handbuch_GK473_DeviceNet_DE.doc 8/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
4.3.4 Einstellen des DeviceNet Abschlusswiderstands
Ist das GK473 DeviceNet das letzte Gerät in der Busleitung, muss der CAN-Bus mit einem Widerstand
abgeschlossen werden. Dieser kann über den einpoligen DIP-Schalter auf „ON“ zugeschaltet werden.
Werkseinstellung :OFF.
ON
1
ON = Letzter Teilnehmer
OFF = Teilnehmer X
4.3.5 EDS-Datei
Zur komfortablen Einbindung /Projektierung des Gateways im DeviceNet-Projekt kann eine EDS-Datei
verwendet werden . (-> Download im Internet oder als Zubehör)
GK473_DN.eds

Handbuch_GK473_DeviceNet_DE.doc 9/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
5 Schnittstellenbeschreibung DeviceNet
5.1 Datenaustausch DeviceNet Master <-> Slave
DeviceNet wurde von Rockwell Automation und der ODVA (Open DeviceNet Vendor Association) als offener
Feldbusstandard, basierend auf dem CAN-Protokoll entwickelt. DeviceNet ist in der europäischen Norm EN
50325 standardisiert. Spezifikation und Pflege des Device-Net-Standards obliegen der ODVA. DeviceNet ist
ein objektorientiertes Bussystem und arbeitet nach dem Producer/Consumer Verfahren. DeviceNet Geräte
können Client (Master) oder Server (Slave) sein, oder beides. Clients und Server können Producer,
Consumer oder beides sein.
Die Schicht 2 (Data Link Layer) basiert auf dem Controller Area Netzwerk (CAN).
In einem DeviceNet Netzwerk können bis zu 64 Busteilnehmer mit Baudraten von 125, 250 oder 500 kBaud
miteinander kommunizieren. Das DeviceNet Kabel sieht neben den beiden Signalen für die
Datenübertragung CAN-L und CAN-H auch 2 Leitungen für die Versorgung der DeviceNet Busteilnehmen mit
24 Volt Betriebsspannung vor. Die Busteilnehmer können busgespeist oder fremdgespeist ausgeführt werden
(GK473 nur fremdgespeist). Die maximale Länge des DeviceNet Kabels ist abhängig vom gewählten
Kabeltyp und der Baudrate. Die Installation erfolgt in einer Bustopologie - mit oder ohne Abzweigen - und
Abschlusswiderständen an beiden Enden. Die Abschlusswiederstände haben einen Wert von 120 Ohm.
Das GK473 DeviceNet Gateway arbeitet als ein Class 2 Slave im DeviceNet Netzwerk. Das Gerät unterstützt
I/O Poll Verbindungen und Change-Of-State Nachrichten des predefined Master Slave Connection Set. Das
Gerät unterstützt nicht "Explicit Unconnected Message Manager" (UCMM).
I/O Poll
Beim Polling sendet der DeviceNet-Master ein Poll Request zum GK473. Als Antwort erhält der DeviceNet-
Master die im GK473 gespeicherten Status-Informationen über den angeschlossenen RS485 Subbus mit
dessen Teilnehmern.
Das 48 Byte lange Datenpaket beinhaltet folgende Informationen:
Die einzelnen Bits repräsentieren dabei jeweils den entsprechenden Zustand an der jeweiligen Subbus-
Adresse
Byte 0..15 “SPA nicht in Position”
Byte 16..31 “SPA in error state”
Byte 32..47 “SPA in Time Out state”
COS (Change of State)
Der Dateninhalt entspricht dem des I/O Poll.
Daten werden vom GK473 erst dann produziert und zu DeviceNet Master übertragen, wenn sich am Status
des RS485-Subbus Änderungen ergeben haben.
Die Verwendung von Change-of-State Nachrichten trägt erheblich zu einer Reduzierung des
Datenaufkommens im DeviceNet bei.
Nach dem Einrichten der COS Verbindung werden einmalig 48 Byte Nutzdaten gesendet.
Danach : Nachricht wird erst gesendet (produce) wenn sich ein vorheriger Zustand geändert hat.
Vorteil:
Im Normalfall sind alle Bytes auf 0 -> alle SPA’s in Position, keine SPA mit error und keine SPA’s mit Time
Out.
Erst wenn sich etwas an diesem Zustand ändert, werden Eingangsdaten für die Steuerung produziert.
Damit kann die Buslast sehr klein gehalten werden.
5.2 Datenaustausch DeviceNet <-> RS485-Subbus
Das Gateway stellt die Verbindung zwischen dem Protokoll RS485 der SPA und dem DeviceNet Feldbus her.

Handbuch_GK473_DeviceNet_DE.doc 10/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
Die Ausgangsdaten der SPS (DeviceNet Master) zum Gateway enthalten den vollständigen Befehl für die
adressierte Spindelpositionsanzeige. Dieser wird um Startzeichen, Stoppzeichen und CRC Prüfsumme
ergänzt und vom Gateway über RS485 weitergeleitet.
In der umgekehrten Richtung wird aus der RS485 Message das Startzeichen, das Stopzeichen und die CRC
Prüfsumme entfernt, aber ansonsten inhaltlich unverändert in den Datenblock einer DeviceNet Message
übertragen, so dass sie in der SPS-Steuerung als konsistente Eingangsdaten zur Verfügung stehen.
Ergänzend ist das Gateway mit Zusatzfunktionen ausgestattet, die die übergeordnete SPS entlasten und die
dortige Programm-Erstellung vereinfachen.
6 DeviceNet CIP Object Implementation
DeviceNet basiert auf dem Common Industrial Protocol (CIP)
Die folgenden CIP Objekte sind im GK473 implementiert:
Mandantory Objects
Class Code Object Name Number of Instances
0x01 Identity 1
0x03 DeviceNet 1
0x04 Assembly 1
0x05 Connection 3
0x2B Acknowledge Handler 1
Vendor Specific Objects
Class Code Object Name Number of Instances
0x64 GK473 1

Handbuch_GK473_DeviceNet_DE.doc 11/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
Identity Object, Class 0x01
Class Attributes
Attribute ID Access Rule
Name
DeviceNet
Data type
Value
1 Get Revision UINT 0x0001
Class Services Service Code
Get Attribute Single 0x0E
Instance Attributes
Attribute ID Access Rule
Name
DeviceNet
Data type
Value
1 Get Vendor ID UINT 0x01D4
2 Get Device Type UINT 0x000C
3 Get
Product Code
UINT 0x002D
4 Get Revision
STRUCT
of:
USINT:Major
fieldbus version
USINT: Minor
fieldbus version
0x0101
5 Get Status WORD
Siehe Common
Industrial
Specification
6 Get Serial Number UDINT 0x00000001
7 Get Product Name SHORT_STRING
“GK473
DeviceNet”
8 Get State USINT
Siehe Common
Industrial
Specification
Instance Services Service Code
Get Attribute Single 0x0E
Set Attribute Single 0x10
RESET 0x05

Handbuch_GK473_DeviceNet_DE.doc 12/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
Message Router Object, Class 0x02
Ist implementiert, hat aber keine extern sichtbaren Attribute oder Services
DeviceNet Object, Class 0x03
Class Attributes
Attribute ID Access Rule
Name
DeviceNet
Data type
Value
1 Get Revision UINT 0x0002
Class Services Service Code
Get Attribute Single 0x0E
Instance Attributes
Attribute ID Access Rule
Name
DeviceNet
Data type
Value
1 Get MAC ID UISNT
2 Get Baud Rate USINT
3 Get
BOI (Bus Off Interrupt)
BOOL
4 Get Bus Off Counter USINT
5 Get Allocation Information
STRUCT
of:
Allocation choice Byte Byte
Master’s MAC ID USINT
6 Get MAC ID Switch changed BOOL
7 Get Baud Rate Switch changed BOOL
8 Get MAC ID Switch Value USINT
9 Get Baud Rate Switch Value USINT
Instance Services Service Code
Get Attribute Single 0x0E
Set Attribute Single 0x10
Allocate Master/Slave connection
Set
0x4B
Release Master/Slave connection
Set
0x4C
Assembly Object, Class 0x04
Class Attributes
Attribute ID Access Rule
Name
DeviceNet
Data type
Value
1 Get Revision UINT 0x0002
Class Services Service Code
Get Attribute Single 0x0E
Instance Attributes – Instance/Connection 0x65
Attribute ID Access Rule
Name
DeviceNet
Data type
Value
3 Get
RS485 Subbus, SPA Status Information
komplett
ARRAY[48] of
USINT
Instance Services Service Code
Get Attribute Single 0x0E

Handbuch_GK473_DeviceNet_DE.doc 13/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
Connection Object, Class 0x05
Class Attributes
Attribute ID Access Rule
Name
DeviceNet
Data type
Value
1 Get Revision UINT 0x0001
Class Services Service Code
Get Attribute Single 0x0E
Create 0x08
Instance 1 = Explicit Messaging Connection
Instance 2 = I/O Poll Connection
Instance 4 = Change of State (COS) Connection
Instance 2 IO Poll Connection Attributes
Attribute
ID
Access
Rule
Name
DeviceNet
Data type
Value
Description
1 Get State
USINT
0x01
0 = Non existent
1 = Configuring
3 = Established
4 = Timeout
2 Get Instance type USINT 0x01 I/O Connection
3 Get Transport Class Trigger
BYTE
0x83
Defines the behaviour of the connection
4 Get Produced Connection ID
UINT
0x3FF
CAN ID for transmission
5 Get Consumed Connection ID UINT 0x5FD CAN ID for reception
6 Get
Initial Comm
Characteristics
BYTE
0x01
Defines Message Groups to
consume/produce date
7 Get Produced Connection Size
UINT
0x0030
Number of bytes transmitted across
this connection
8 Get
Consumed Connection
Size
UINT
0x0000
Number of bytes received across
this connection
9 Get/Set Expected Packet Rate UINT Timing associated with this connection
12 Get Watchdog Time out action
USINT
0x00
0 = Transition to the timed out state
1 = Auto Delete
2 = Auto Reset
3 = Deferred Delete
13 Get
Produced Connection Path
length
UINT
0x0006
Number of bytes in the produced
Connection path attribute
14 Get Produced Connection Path
EPATH
0x200424653003
Application object producing data
on this connection
15 Get
Consumed connection
Path length
UINT
0x0006
Number of bytes in the consumed
Connection path length attribute
16 Get
Consumed Connection
Path
EPATH
0x200424653003
Specifies the application object(s)
that are to receive the data consumed
by this connection object
17 Get/Set Production Inhibit Time UINT 0x0000 Production Inhibit Time
Instance Services Service Code
Delete 0x09
Reset 0x05
Apply Attributes 0x0D
Get Attribute Single 0x0E
Set Attribute Single 0x10

Handbuch_GK473_DeviceNet_DE.doc 14/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
Acknowledge Handler Object, Class 0x2B
Class Attributes
Attribute ID Access Rule
Name
DeviceNet
Data type
Value
1 Get Revision UINT 0x0001
2 Get Max instance UINT 0x0001
Class Services Service Code
Get Attribute Single 0x0E
Instance Attributes
Attribute
ID
Access
Rule
Name
DeviceNet
Data type
Value
Description
1 Get/Set Acknowledge timer
UINT
0x0018
Time (in ms) to wait for
acknowledge
before resending
2 Get/Set Retry Limit
USINT
0x20
Number of Ack Timeouts to wait
before informing the producing
application of a
RetryLimit_Reached event.
3 Get/Set
Producing
Connection Instance
USINT
0x0004
Connection Instance which
contains the path of the
producing I/O application object
which will be notified of Ack
Handler events.
4 Get
Ack List Size
BYTE
0x01
Maximum number of members
in Ack List
5 Get
Ack List
BYTE
Array
of
UINT
0x00
List of active connection
instances which are receiving
Acks
6 Get
Data with Ack
Path List Size
BYTE
0x01
Maximum number of members
in Data with Ack Path List
7 Get
Data with Ack
Path List
BYTE
Array
of
UINT
USINT
Padded
EPATH
0x01040006206424013005
List of connection
instance/consuming application
object pairs. This attribute is
used to forward data received
with acknowledgment.
Instance Services Service Code
Get Attribute Single 0x0E
Set Attribute Single 0x10

Handbuch_GK473_DeviceNet_DE.doc 15/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
7 GK473 Object, Class 0x64
Class Attributes
Attribute ID Access Rule
Name
DeviceNet
Data type
Value
1 Get Revision UINT 0x0001
2 Get Max instance UINT 0x0001
Class Services Service Code
Get Attribute Single 0x0E
Instance Attributes
Attribute
ID
Access Rule
Name
DeviceNet
Data type
Value
Description
1 Get/Set Autoscan SPA
BOOL
1
Automatisches Scanning des RS485
Subbusses Aus (0)-/Einschalten (1)
2
RWTransfer
Service
Code 0x32
Transfer SPA
Kommando
transparent
ARRAY[16] of
USINT
0x20
Zum Übertragen aller Kommandos der
Spindelpositionsanzeigen (SPA) vom
DeviceNet Master transparent „durch“ das
GK473 zur SPA und zurück
3 Get
RS485 Subbus,
SPA Status
Information
komplett
ARRAY[48] of
USINT
Komplette binär kodierte Information über
Zustand, Anzahl und Adressen der am RS485
Subbus angeschlossenen
Spindelpositionsanzeigen(SPA)
Byte 0..15 “SPA nicht in Position”
Byte 16..31 “SPA in Error Status”
Byte 32..47 “SPA in Timeout Status”
4 Get
Angeschlossene
SPA
ARRAY[16] of
USINT
binär kodierte Information über Anzahl und
Adressen der am RS485 Subbus
angeschlossenen SPA
5 Get
SPA nicht in
Position
ARRAY[16] of
USINT
binär kodierte Information über Anzahl und
Adressen der am RS485 Subbus
angeschlossenen Spindelpositionsanzeigen
(SPA) die sich im Zustand nicht in Position
befinden
6 Get SPA in Error Status
ARRAY[16] of
USINT
binär kodierte Information über Anzahl und
Adressen der am RS485 Subbus
angeschlossenen
Spindelpositionsanzeigen(SPA) die sich im
Zustand in Error Status befinden
7 Get
SPA in Timeout
Status
ARRAY[16] of
USINT
binär kodierte Information über Anzahl und
Adressen der am RS485 Subbus
angeschlossenen
Spindelpositionsanzeigen(SPA) die sich im
Zustand in Timeout Status befinden
Instance Services Service Code
Get Attribute Single 0x0E
Set Attribute Single 0x10
RWTransfer 0x32 Vendor Specific

Handbuch_GK473_DeviceNet_DE.doc 16/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
7.1 Attribute 1: Autoscan SPA
Class Instance Attribute Access Rule
Name
DeviceNet
Data type
Default
Value
100 1 1 Get/Set
Autoscan SPA, Automatisches Scanning des
RS485 Subbusses Aus-/Einschalten
BOOL 1
Voreinstellung: 1= ON
Während des Betriebs scannt das Gateway fortlaufend selbsttätig alle angeschlossenen SPA ab und prüft,
ob sie „in Position“ sind. Diese Information kann bei Bedarf mit einem Sonderbefehl gesammelt über
DeviceNet eingelesen werden. Das AutoScan erspart es dem DeviceNet Master, jede SPA zyklisch selbst
abzufragen.
Diese Betriebsart ist erforderlich, damit die Sammelinformationsobjekte (GK473 class Attribute 3..7) gültige
Daten liefern.
Es gibt jedoch Betriebssituationen, in denen diese Funktion unerwünscht sein kann.
Verschiedene Befehle an die SPA haben nur solange Gültigkeit, bis ein anderer Befehl empfangen wird (z.B.
Anzeige der SPA Adresse in der unteren Displayzeile). Das automatische Scannen würde diese Befehle
unwirksam machen. Darüber hinaus beansprucht das Scannen über weite Strecken den RS485 Bus, so dass
das Gateway bei abgeschaltetem Scannen die Befehle vom DeviceNet-Master schneller bearbeiten kann.

Handbuch_GK473_DeviceNet_DE.doc 17/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
7.2 Attribute 2: Transfer SPA Kommando transparent
Class Instance Attribute Access Rule
Name
DeviceNet
Data type
Default
Value
100 1 2
Transparent
Transfer
Service Code
0x32
(Vendorspecific)
Transfer SPA Kommando transparent
ARRAY[16]
of USINT
Mit diesem Objekt können unter Verwendung des vendor specific service Codes 0x32 alle Kommandos für
Spindelpositionsanzeigen (SPA) transparent übertragen werden.
Grundsätzlich werden alle Befehle mit den Befehlscodes „A“...“z“ vom DeviceNet Master zu den SPA und
umgekehrt transparent durchgeleitet. Dies ermöglicht, jede SPA einzeln oder über einen Broadcast-Befehl
alle gemeinsam von der SPS anzusprechen. Ob eine SPA mit der eingetragenen Adresse angeschlossen ist,
überprüft das Gateway nicht. Es überprüft auch nicht den Befehlscode.
Das Gateway antwortet auf jeden Befehl, den es vom DeviceNet-Master (der SPS) erhält.
Die Antwort erfolgt
• in Form des transparenten Durchreichens der SPA-Antwort, wenn eine einzelne SPA direkt
adressiert wurde und diese ordnungsgemäß antwortet
• In Form einer Abort-Fehlermeldung, wenn die SPA nach einer Timeout-Zeit (ca. 100ms) nicht
geantwortet hat
Wenn im DeviceNet-Master ein Timeout zur Überwachung der Antworten des Gateways geführt werden soll,
sollte es nicht unter 400ms liegen.
Vom kompletten Kommando für die adressierte Spindelpositionsanzeige (SPA) werden die Senden -Daten
innerhalb der Begrenzungen SOH und EOT vom DeviceNet Master zum GK473 übertragen. Länge ist
immer 16 Byte, nicht verwendete Stellen werden mit Wert 0 aufgefüllt.
Beispiel: Sollwert programmieren (Profilnummer = 17; Sollwert = -12,50; SPA Adresse 0)
SOH Adr Cmd Profil-Nr. = 17 Sollwert = -12,50 EOT CRC
Senden
01h 20h 53h 31h 37h 2Dh 30h 31h 32h 35h 30h 04h FBh
In der umgekehrten Richtung wird aus der RS485 Message (Antwort der SPA) das Startzeichen, das
Stoppzeichen und die CRC Prüfsumme entfernt, aber ansonsten inhaltlich unverändert in den Datenblock
einer DeviceNet Message übertragen, so dass sie in der SPS-Steuerung als konsistente Eingangsdaten zur
Verfügung stehen.
Beispiel: Sollwert programmieren (Profilnummer = 17; Sollwert = -12,50; SPA Adresse 0)
SOH Adr Cmd Profil-Nr. = 17 Sollwert = -12,50 EOT CRC
Antwort
01h 20h 53h 31h 37h 2Dh 30h 31h 32h 35h 30h 04h FBh
Angaben zu Inhalt und Format der Kommandos für Spindelpositionsanzeigen (SPA) entnehmen Sie
bitte dem jeweiligen Handbuch.

Handbuch_GK473_DeviceNet_DE.doc 18/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
Beispiel zum Transfer SPA Kommando transparent
SPA Adresse 0 (0x20) Kommando Istwert lesen „R“ (0x52)
Auszug Betriebsanleitung SPA N140 :
Dieser Befehl liest den 6-stelligen Istwert (untere Anzeige) aus. Die Datenlänge beträgt immer 6 Byte. Ist der
Wert negativ wird das Minuszeichen (2Dh) und 5 Datenbytes zurückgeliefert. Bei positiven Werten werden 6
Datenbytes ohne Vorzeichen zurückgesendet. Bei Werten kleiner 6 (5) Stellen werden Vornullen gesendet.
Beispiel: Istwert = -32,50
SOH Adr Cmd EOT CRCSenden
01h 20h 52h 04h 40h
SOH Adr Cmd Istwert = –32,50 EOT CRC
Antwort
01h 20h 52h
2Dh 30h 33h 32h 35h 30h
04h 54h
weitere Beispiele siehe Anhang

Handbuch_GK473_DeviceNet_DE.doc 19/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
Sammelinformationen : GK473 class Instance Attribute 3..7
Mit diesen Objekten kann sehr bequem der Zustand des RS485 Subbusses und somit der Status aller
Spindelpositionsanzeigen beobachtet werden.
Vorraussetzung für die Aktualität der Daten ist ein eingeschaltetes Auto Scan SPA
Mit dieser Einstellung wird der RS485 Subbus laufend gescannt und Änderungen im Speicher des GK473
abgelegt.
Bei Bedarf kann nun dieser Zustand per Explicit Message, I/O Poll oder Change of State (COS) in die SPS
eingelesen werden.
7.3 Attribute 3: RS485 Subbus, SPA Status Information komplett
Class Instance Attribute Access Rule
Name
DeviceNet
Data type
Default
Value
100 1 3 Get
RS485 Subbus, SPA Status Information
komplett
ARRAY[48]
of USINT
Es werden 48 Bytes ausgegeben. Diese zeigen den kompletten momentanen Zustand der
Spindelpositionsanzeigen (SPA’s) auf dem RS485 Subbus an.
Die SPA-Adressen und deren zugehörige Zustände sind wie folgt binär kodiert
Das Datenpaket beinhaltet folgende Informationen
Byte 0..15 “SPA nicht in Position”
Byte 16..31 “SPA in Error Status”
Byte 32..47 “SPA in Timeout Status”
In folgendem Beispiel unten
SPA mit Adresse 1,2,7 und 30 sind nicht in Position
SPA mit Adresse 5 ist in Error Status (Motor keine Spannungsversorgung)
SPA mit Adresse 58 ist in Timeout Status (Kabelbruch, keine Antwort mehr)

Handbuch_GK473_DeviceNet_DE.doc 20/31 Baumer IVO GmbH & Co. KG
04.05.11 Villingen-Schwenningen, Germany
Beispiel zusammen mit RSNetworx class instance editor
Byte[0]..[15]
binär
Byte[16]..[31]
binär
Byte[32]..[47]
binär
0 31 62 93 2
0
0 31 62 93 2
0
0 31 62 93 2
0
1 32 63 94 2
1
1 32 63 94 2
1
1 32 63 94 2
1
2 33 64 95 2
2
2 33 64 95 2
2
2 33 64 95 2
2
3 34 65 96 2
3
3 34 65 96 2
3
3 34 65 96 2
3
4 35 66 97 2
4
4 35 66 97 2
4
4 35 66 97 2
4
5 36 67 98 2
5
5 36 67 98 2
5
5 36 67 98 2
5
6 37 68 bc 2
6
6 37 68 bc 2
6
6 37 68 bc 2
6
7 38 69 res. 2
7
7 38 69 res. 2
7
7 38 69 res. 2
7
8 39 70 res. 2
0
8 39 70 res. 2
0
8 39 70 res. 2
0
9 40 71 res. 2
1
9 40 71 res. 2
1
9 40 71 res. 2
1
10 41 72 res. 2
2
10 41 72 res. 2
2
10 41 72 res. 2
2
11 42 73 res. 2
3
11 42 73 res. 2
3
11 42 73 res. 2
3
12 43 74 res. 2
4
12 43 74 res. 2
4
12 43 74 res. 2
4
13 44 75 res. 2
5
13 44 75 res. 2
5
13 44 75 res. 2
5
14 45 76 res. 2
6
14 45 76 res. 2
6
14 45 76 res. 2
6
15 46 77 res. 2
7
15 46 77 res. 2
7
15 46 77 res. 2
7
16 47 78 res. 2
0
16 47 78 res. 2
0
16 47 78 res. 2
0
17 48 79 res. 2
1
17 48 79 res. 2
1
17 48 79 res. 2
1
18 49 80 res. 2
2
18 49 80 res. 2
2
18 49 80 res. 2
2
19 50 81 res. 2
3
19 50 81 res. 2
3
19 50 81 res. 2
3
20 51 82 res. 2
4
20 51 82 res. 2
4
20 51 82 res. 2
4
21 52 83 res. 2
5
21 52 83 res. 2
5
21 52 83 res. 2
5
22 53 84 res. 2
6
22 53 84 res. 2
6
22 53 84 res. 2
6
23 54 85 res. 2
7
23 54 85 res. 2
7
23 54 85 res. 2
7
24 55 86 res. 2
0
24 55 86 res. 2
0
24 55 86 res. 2
0
25 56 87 res. 2
1
25 56 87 res. 2
1
25 56 87 res. 2
1
26 57 88 res. 2
2
26 57 88 res. 2
2
26 57 88 res. 2
2
27 58 89 res. 2
3
27 58 89 res. 2
3
27 58 89 res. 2
3
28 59 90 res. 2
4
28 59 90 res. 2
4
28 59 90 res. 2
4
29 60 91 res. 2
5
29 60 91 res. 2
5
29 60 91 res. 2
5
30 61 92 res. 2
6
30 61 92 res. 2
6
30 61 92 res. 2
6
SPA Nicht in Position, SPA Adresse
31 62 93 res. 2
7
SPA in error State , SPA Adresse
31 62 93 res. 2
7
SPA in timeout State , SPA Adresse
31 62 93 res. 2
7
/