ro-navy
Operating Manual
?

Operating Manual
RO-Control NAVY Serie
No.8721
No.8722
No.8723
No.8724
Operating Manual
RO-Control Navy Serie
30 / 60 / 120 / 180 A
Brushless Electronic Speed
Controller
Art.-Nr.: xxxxxxxxxxxx
Art.-Nr.: xxxxxxxxxxxx
Art.-Nr.: xxxxxxxxxxxx
Art.-Nr.: xxxxxxxxxxxx
Dear customer, we are pleased that you have chosen a RO-Control Navy speed controller for
brushless motors from our range. This gives you a particularly powerful controller for controlling
your rc-boats engine.
Despite the relatively simple operation of these controllers, their use requires some knowledge from
you. These instructions will help you to familiarize yourself quickly with the possibilities of the speed
controller. To achieve this goal safely and quickly, you should read these operating instructions
carefully before commissioning the controller. The following safety instructions and warnings are of
particular importance.
Brushless motors can be very dangerous. Any improper use can cause
personal injury and destroy the controller and the devices connected to it. We
strongly recommend that you read these operating instructions completely
before use. Since we have no control over the use, installation or
maintenance of the controller, we accept no liability for this product for any
damage or loss resulting from the use of the product.
We also accept no responsibility for damage or loss caused by unauthorized changes to our
product.
Remote-controlled models are not toys and may only be used by young people under 14 years of
age under the constant supervision of adults who are familiar with the construction, operation,
material and possible dangers. Construction, commissioning and operation of remote-controlled
models are dangerous and are the full responsibility of the operator. We expressly point out these
risks and accept no liability. Careful, well-considered handling during operation protects against
personal injury and property damage. Carry out maintenance and inspections of your models and
electronic devices at short, regular intervals. Check regularly that all fastenings are securely
fastened.
The controllers are only intended for use in battery- or battery-operated, remote-controlled models.
Any other operation is not permitted. Please note that despite many safety features, an
accidentally starting electric motor, e.g. due to a defect of the controller, has considerable risk
potential and can result in considerable injuries. We cannot check the handling of the controller
and reject any claim for damages due to failure, faulty operation or malfunction.
We assume no liability for personal injury, property damage and their consequences arising from
our delivery or work. Never operate a damaged regulator, e.g. due to exposure to water or
mechanical deformation, a crash or similar.
Make sure that you do not reverse the polarity of the battery, that you avoid short circuits, that
the drive motor is effectively suppressed and that the air can circulate freely. Use reverse
polarity protected connector systems.
No.8721
No.8722
No.8723
No.8724

Operating Manual
RO-Control NAVY Serie
No.8721
No.8722
No.8723
No.8724
Operating Manual
RO-Control Navy Serie
30 / 60 / 120 / 180 A
Brushless Electronic Speed
Controller
Art.-Nr.: xxxxxxxxxxxx
Art.-Nr.: xxxxxxxxxxxx
Art.-Nr.: xxxxxxxxxxxx
Art.-Nr.: xxxxxxxxxxxx
Dear customer, we are pleased that you have chosen a RO-Control Navy speed controller for
brushless motors from our range. This gives you a particularly powerful controller for controlling
your rc-boats engine.
Despite the relatively simple operation of these controllers, their use requires some knowledge from
you. These instructions will help you to familiarize yourself quickly with the possibilities of the speed
controller. To achieve this goal safely and quickly, you should read these operating instructions
carefully before commissioning the controller. The following safety instructions and warnings are of
particular importance.
Brushless motors can be very dangerous. Any improper use can cause
personal injury and destroy the controller and the devices connected to it. We
strongly recommend that you read these operating instructions completely
before use. Since we have no control over the use, installation or
maintenance of the controller, we accept no liability for this product for any
damage or loss resulting from the use of the product.
We also accept no responsibility for damage or loss caused by unauthorized changes to our
product.
Remote-controlled models are not toys and may only be used by young people under 14 years of
age under the constant supervision of adults who are familiar with the construction, operation,
material and possible dangers. Construction, commissioning and operation of remote-controlled
models are dangerous and are the full responsibility of the operator. We expressly point out these
risks and accept no liability. Careful, well-considered handling during operation protects against
personal injury and property damage. Carry out maintenance and inspections of your models and
electronic devices at short, regular intervals. Check regularly that all fastenings are securely
fastened.
The controllers are only intended for use in battery- or battery-operated, remote-controlled models.
Any other operation is not permitted. Please note that despite many safety features, an
accidentally starting electric motor, e.g. due to a defect of the controller, has considerable risk
potential and can result in considerable injuries. We cannot check the handling of the controller
and reject any claim for damages due to failure, faulty operation or malfunction.
We assume no liability for personal injury, property damage and their consequences arising from
our delivery or work. Never operate a damaged regulator, e.g. due to exposure to water or
mechanical deformation, a crash or similar.
Make sure that you do not reverse the polarity of the battery, that you avoid short circuits, that
the drive motor is effectively suppressed and that the air can circulate freely. Use reverse
polarity protected connector systems.
No.8721
No.8722
No.8723
No.8724
Operating Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Page
2
All cables and connections should be well insulated. The regulator must not come into contact with
grease or oil. Only use the connectors, original parts and accessories recommended by us. Always
set the throttle to "Stop" before switching on the transmitter.
In addition, it is imperative that you observe the following notes:
• Make sure that all cables and connections are well insulated before connecting the controller to
other devices, as a short circuit can damage the controller.
• Ensure that all equipment is properly connected, poor connections may cause you to lose
control of your model ship and cause other unforeseen problems, personal injury, property
damage or destruction of the controller.
• Stop the controller if it gets too warm. Otherwise the controller and / or the motor will be
damaged.
• Never try to operate two brushless motors with only one controller, otherwise the controller will
fail.
• Always keep the propeller away from your body and other objects, as they can be very
dangerous.
• Protect the speed controller from vibrations, dust, moisture and mechanical stress!
• Always connect the drive battery to the controller just before starting the model. After landing,
disconnect immediately.
• The controller is equipped with a tarnish protection. Nevertheless, for safety reasons, be very
careful and cautious when plugging the battery into the controller to prevent personal injury.
• Even if the receiving system is switched off, but the battery is still connected to the controller,
there is a fundamental risk potential.
• Make absolutely sure that the controller is always operated within the values of the technical
data. Overloading can lead to damage, resulting in great dangers.
• Always follow the instructions for connecting and installing the controller.
• High currents cause the cables to heat up, which can cause fire or burns to the skin. Lay the
cabling accordingly and proceed very carefully.
• Be sure to follow the warnings of the manufacturer of the motor, battery and model you are
using.
• The controller must never be connected to the 230V AC mains.
• When operating a model ship, you must comply with all safety regulations so as not to
endanger yourself and others.
After use, please remove all batteries and dispose of them separately. Hand in old
electrically operated equipment free of charge at the municipalities' collection points
for electrical waste. The remaining parts belong in the household waste.
Thank you for your help!
• Protected against splash water and moisture to IP67, the controller is suitable for use
where water can get inside the model. After such use, the regulator must be cleaned and
dried so that the plugs do not oxidize.
0
1
.
Features

Operating Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Page
3
• With a copper cooling head for good heat dissipation with a water cooling system and
MOSFETs with extremely low internal resistance, this greatly improves overcurrent resistance.
• Innovative software especially for the use of RC boats, with excellent starting and acceleration
behaviour, in connection with an excellent suitability for applications where rapid load changes
occur.
• Two different modes can be set: forward, forward and reverse for different applications
• Several built-in safety precautions: Undervoltage cut-off, overheating protection, protection
against loss of input signal, specially designed for use in RC-boats
• Eight different timing levels programmable, thus compatible with most brushless motors
• Convenient configuration via optional programming card possible
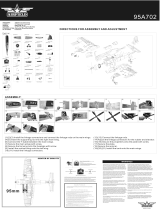
Connect the ESC, motor, receiver, drive battery and servos as shown in the following two pictures.
The three lines from the controller to the motor have no polarity and can be connected freely.
Please check all connections and make sure the motor rotates correctly before proceeding to step
2. If the motor has the wrong direction of rotation, it is necessary to exchange any two connections
between controller and motor.
02. Commissioning a new controller
Connections
yellow
blue
receiver
controller
switch
Picture 1
battery
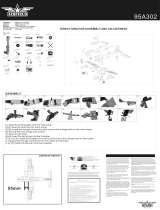
Picture 2
yellow
blue
receiver
controller
switch
battery 1
battery 2

Operating Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Page
3
• With a copper cooling head for good heat dissipation with a water cooling system and
MOSFETs with extremely low internal resistance, this greatly improves overcurrent resistance.
• Innovative software especially for the use of RC boats, with excellent starting and acceleration
behaviour, in connection with an excellent suitability for applications where rapid load changes
occur.
• Two different modes can be set: forward, forward and reverse for different applications
• Several built-in safety precautions: Undervoltage cut-off, overheating protection, protection
against loss of input signal, specially designed for use in RC-boats
• Eight different timing levels programmable, thus compatible with most brushless motors
• Convenient configuration via optional programming card possible
Connect the ESC, motor, receiver, drive battery and servos as shown in the following two pictures.
The three lines from the controller to the motor have no polarity and can be connected freely.
Please check all connections and make sure the motor rotates correctly before proceeding to step
2. If the motor has the wrong direction of rotation, it is necessary to exchange any two connections
between controller and motor.
02. Commissioning a new controller
Connections
Operating Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Page
4
Figure 1: For the types RO-Control
Navy 30, RO-Control Navy 60 or other
controllers that work with a LiPo battery.
Figure 2: For the types RO-Control
Navy 120, RO-Control Navy 180 or other
controllers that work with two LiPo
batteries.
RO-Control Navy
30 A
RO-Control Navy
60 A
RO-Control Navy
120 A
RO-Control Navy
180 A
Rated current
30 A 60 A 120 A 180 A
Peak current
180 A 360 A 720 A 1.080 A
BEC Type
linear linear
clocked clocked
BEC Output
6 V / 1 A 6 V / 2 A 6 V / 5 A 6 V / 5 A
LiPo cells
2 - 3 2 - 3 2 - 6 2 - 6
Programming port
unavailable
available available available
Weight
41 g 93 g 150 g 207 g
Water cooling
di = 2,0 mm
da = 4,0 mm
di = 2,0 mm
da = 4,0 mm
di = 3,0 mm
da = 5,4 mm
di = 3,0 mm
da = 5,4 mm
Dimension
54,5 x 28,3 x
18,7 mm
60,5 x 38,5 x
25,6 mm
68,5 x 39,4 x
32 mm
72 x 48 x
36,6 mm
Boat Applicable
length
< 45 cm
length
< 70 cm
length
< 110 cm
length
< 130 cm
Because the different transmitters have different sensor paths, the gas control
stick must be calibrated before the first start-up. This procedure must also be
performed when changing the remote control transmitter and when changing
the settings for the gas channel, such as changing the trim, the dual rate
function and the path setting. Please follow these steps.
Technical Specifications
1. Switch on the transmitter and controller, set the parameters for the gas channel such as Dual
Rate or the travel setting to 100 %. Set the throttle trim to "0". For transmitters without LC
display, set the encoder to maximum and the mechanical trim to the center. For Futaba
transmitters set the direction to "Reverse", for other transmitters it must remain set to
"Normal". We recommend activating a Fail Safe function to ensure that your rc-boat
stops if there is no valid input signal.
Note: If the transmitter is equipped with an ABS function, be sure to disable it. It hinders the
procedure for the calibration of the gas control stick or makes the procedure impossible.
For safety reasons, always keep
yourself and other objects away
from the ship's propeller.
The red cable is the positive pole,
the black cable is the negative
pole.
Throttle Range Calibration

Operating Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Seite
5
2. Calibrate the throttle on a pistol grip transmitter:
a) a) Pull the throttle back to full throttle position and hold it in
this position, then connect the battery to the regulator and switch
it on, 2 seconds later the engine will emit two short beeps (beep,
beep), the full throttle position has been accepted.
b) Move the throttle lever to the neutral position, a long tone
(beep----) is emitted, which means the calibration is complete.
Notice:
While the acoustic signal is being output, the
red LED lights up simultaneously.
3. Calibrate one transmitter throttle lever with joysticks:
a) Pull the throttle stick into the forward position, then
connect the battery to the regulator and switch it on, 2 sec.
later the engine switches off two short tones (beep-, beep-),
the full throttle position has been accepted.
b) If you want to set the throttle range to the "half stick
travel", move the throttle lever to the neutral position. If you
want to use the full stick travel, move the throttle stick to
the lower position. A long tone (beep----) is emitted, i.e.
calibration is complete.
Notice:
While the acoustic signal is being output,
the red LED lights up simultaneously.
Normal switch-on procedure:
1. Move the throttle or throttle control stick to the lower position and switch on the
transmitter.
2. Connect the battery to the controller and switch on the controller.
3. The motor emits a series of tones indicating the number of LiPo cells. If only one
tone is output, this indicates that the undervoltage cutoff is active. For Nickel
cells you can deactivate the function during programming, for LiPo cells you
must not do this, the cells could be destroyed due to a deep discharge.
4. One second later, the motor emits a long tone indicating that the "Motor Off"
position has been detected. If the control transmitter is not in the correct
position, a permanent warning tone (beep, beep) is emitted.
5. Move the throttle lever / stick forward, the engine starts.

Operating Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Seite
5
2. Calibrate the throttle on a pistol grip transmitter:
a) a) Pull the throttle back to full throttle position and hold it in
this position, then connect the battery to the regulator and switch
it on, 2 seconds later the engine will emit two short beeps (beep,
beep), the full throttle position has been accepted.
b) Move the throttle lever to the neutral position, a long tone
(beep----) is emitted, which means the calibration is complete.
Notice:
While the acoustic signal is being output, the
red LED lights up simultaneously.
3. Calibrate one transmitter throttle lever with joysticks:
a) Pull the throttle stick into the forward position, then
connect the battery to the regulator and switch it on, 2 sec.
later the engine switches off two short tones (beep-, beep-),
the full throttle position has been accepted.
b) If you want to set the throttle range to the "half stick
travel", move the throttle lever to the neutral position. If you
want to use the full stick travel, move the throttle stick to
the lower position. A long tone (beep----) is emitted, i.e.
calibration is complete.
Notice:
While the acoustic signal is being output,
the red LED lights up simultaneously.
Normal switch-on procedure:
1. Move the throttle or throttle control stick to the lower position and switch on the
transmitter.
2. Connect the battery to the controller and switch on the controller.
3. The motor emits a series of tones indicating the number of LiPo cells. If only one
tone is output, this indicates that the undervoltage cutoff is active. For Nickel
cells you can deactivate the function during programming, for LiPo cells you
must not do this, the cells could be destroyed due to a deep discharge.
4. One second later, the motor emits a long tone indicating that the "Motor Off"
position has been detected. If the control transmitter is not in the correct
position, a permanent warning tone (beep, beep) is emitted.
5. Move the throttle lever / stick forward, the engine starts.
Operating Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Page
6
The following table shows the changeable parameters, the fields marked with * indicate the
factory settings.
LiPo cells
Opti-
ons
Mode of operation
1) 2)
Low-voltage protection
Timing
1
forwards only
no shelter 0,00 degree
2 2S 5S
2,8 V / Cell 3,75 degree
3 3S 6S
3,0 V / Cell 7,50 degree
4 4S 8S
11,25 degree
5 5S 10S
3,4 V / Cell
6 6S 12S
18,75 degree
7
22,50 degree
8
1):
2):
This column
applies to controllers with normal input voltage position, with LiPo batteries
from 2S - 6S
This column applies to controllers with high input voltage (HV), with LiPo batteries from 5S -
12S
1. Operating mode: In the operating mode "only forward only" a ship can only go forward. In the
"Forward and Backward" operating mode, the ship can also be steered backwards.
2. LiPo cells: We strongly recommend to set the number of LiPo cells manually. If automatic
detection is selected, the controller determines the number of cells by the level of the battery
voltage. Example: A battery with a voltage below 8.8 V is detected as 2S LiPo. Always connect
a fully charged battery. If this is not the case, errors may occur during automatic detection.
Note: After connecting the battery, the number of cells is indicated by a corresponding number
of tones. This is very helpful to identify and check a battery. If you use batteries with the same
number of cells more often, we recommend setting the value manually.
3. Low voltage protection: With this function a LiPo battery can be protected against deep
discharge. The motor controller constantly checks the battery voltage. If the voltage falls below
the set value for a period of 2 seconds, the power output is reduced to 50 %. The red LED
flashes quickly. Stop operating and then disconnect the battery very quickly.
a) If you do not observe the warning, the battery will inevitably be destroyed.
b) Determination of the cut-off threshold for a battery: cut-off voltage per cell x number of
cells. Example: Switch-off voltage 3.2 V / cell with 3S battery, switch-off voltage = 3.2 V /cell x 3
= 9.6 V.
c) Nickel cells are not so sensitive to deep discharge, protection can be switched off
Timing: Please select the timing level which corresponds to the technical conditions of the engine.
With the right timing, the engine runs best. In general one can say: With a higher input, the power
output is higher, the motor rotates higher and produces more power. But it also warms up more.
03. Promgrammable parameters of the controller
26,25 degree
autom.*
autom.*
forwards & backwards *
3,2 V / Cell *
15,00 degree *

Operating Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Page
7
Programming is carried out in four steps.
Activate programming mode
→
Determine parameters to be changed
→
adjust the selected parameter
→
Exit programming mode
04. Programming the controller
Step 1: Activate programming mode
1. Switch on the transmitter and put the throttle stick into full throttle position, then connect
the drive battery.
2. Turn on the controller and wait 2 seconds, a signal sounds (beep, beep).
3. After another 5 seconds, a tone sequence sounds, indicating that the programming
mode is active.
Step 2 Determine parameters to be changed
After activating the programming mode, 4 different tones sound in succession, which can be
assigned to the individual parameters according to the following arrangement. To select a
parameter, the throttle stick must be moved to the lower position within 3 seconds after
sounding. A special tone indicates that the selected parameter is active and can be changed.
1. Beep-
2. B
eep-, Beep-
3. Beep-, Beep-, Beep-
4. Beep-, Beep-, Beep-, Beep-
(R unning mode
)
Number of LiPo cells
Low-voltage protection
Overtemperature protection
One short note
Two short notes
Three short notes
Four short notes
Step 3 Change the value of the selected parameter
After determining the parameter, different tones sound cyclically in succession, which can be
assigned to the individual values of a parameter according to the following table. To activate
a certain value, bring the throttle stick into full throttle position within 2 seconds. A special
tone sequence will then sound confirming the selection and indicating that the value has been
saved. If you want to stop programming prematurely, move the throttle lever to the lower
"engine off" position within 2 seconds. This allows you to exit the programming mode
immediately and quickly.
If you want to continue, please wait, you will automatically return to step 2 where you can set
another programmable parameter that you can change according to the same procedure.
1Programming the ESC with your transmitter

Operating Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Page
7
Programming is carried out in four steps.
Activate programming mode
→
Determine parameters to be changed
→
adjust the selected parameter
→
Exit programming mode
04. Programming the controller
Step 1: Activate programming mode
1. Switch on the transmitter and put the throttle stick into full throttle position, then connect
the drive battery.
2. Turn on the controller and wait 2 seconds, a signal sounds (beep, beep).
3. After another 5 seconds, a tone sequence sounds, indicating that the programming
mode is active.
Step 2 Determine parameters to be changed
After activating the programming mode, 4 different tones sound in succession, which can be
assigned to the individual parameters according to the following arrangement. To select a
parameter, the throttle stick must be moved to the lower position within 3 seconds after
sounding. A special tone indicates that the selected parameter is active and can be changed.
1. Beep-
2.
Beep-, Beep-
3. Beep-, Beep-, Beep-
4. Beep-, Beep-, Beep-, Beep-
(Run
ning mode)
Number of LiPo cells
Low-voltage protection
Overtemperature protection
One short note
Two short notes
Three short notes
Four short notes
Step 3 Change the value of the selected parameter
After determining the parameter, different tones sound cyclically in succession, which can be
assigned to the individual values of a parameter according to the following table. To activate
a certain value, bring the throttle stick into full throttle position within 2 seconds. A special
tone sequence will then sound confirming the selection and indicating that the value has been
saved. If you want to stop programming prematurely, move the throttle lever to the lower
"engine off" position within 2 seconds. This allows you to exit the programming mode
immediately and quickly.
If you want to continue, please wait, you will automatically return to step 2 where you can set
another programmable parameter that you can change according to the same procedure.
Operating Manual
RO-Control NAVY Serie
No.8721
No.8722
No.8723
No.8724
Page
8
It is possible to comfortably configure these controllers with an optional programming card. The
programming card has three LEDs to display the programming steps and the parameters. It is very
easy to use. With the 30 A controller, the connection cable to the receiver (gas channel) must be
connected to the programming card. The other controllers have a separate programming port for
connecting the programming card.
1. Undervoltage protection: If the voltage level of the battery is below the set limit for a period of
1 second, the motor is switched off. The red LED then flashes rapidly. After the throttle stick has
been brought into the "engine off" position, the engine starts again, with half the power output.
2. Overtemperature protection: If the temperature of the controller exceeds the preset value, the
motor is switched off for safety reasons. The green LED then flashes quickly. After the throttle
stick has been brought into the "engine off" position, the engine starts again, with half the power
output. As soon as the controller has cooled down to below 80°C, the full power can be called
up again.
B B B B B B B B B
B
B---- B---- B B---- B
B
B---- B
B B
Running
Mode
forward
backward
LiPo Cells
autom.
2S 3S 4S 5S 6S
Undervoltage
cut-off
deact.
2,8 V
per
Cell
3,0 V
per
Cell
3,2 V
per
Cell
3,4 V
per
Cell
Timing
0
O
3,75
O
7,5
O
11,25
O
15
O
18,75
O
22,5
O
26,75
O
Note: A long note B----- corresponds to five short notes B, B, B, B, B, B
Example: B----B stands for the sixth value of the parameter (5 + 1)
Step 4 Exit programming mode
Two methods are available for terminating the programming mode.
1. At step 3, after changing the value and the sound of the special sequence of tones, the
throttle can be moved to the "engine off" position. The programming mode is then exited
within 2 seconds.
2. The drive battery can be disconnected in order to leave the programming mode.
05. Integrated protection functions
Programming the ESC with a Programming Card

Operating Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Page
9
3. Protection against signal loss:
If no valid signal is registered by the receiver for a time of 0.1 sec. the controller switches the
motor off. The controller will not restart until valid input signals are detected again. We
recommend activating a Fail Safe function for the gas channel on the transmitter, which should
be set so that the engine is switched off.
The controllers are equipped with two LEDs, one red and one green.
1. When the throttle is pushed beyond the neutral range, the red LED lights up continuously and
the engine starts to rotate. The green LED also lights up as soon as the throttle lever is in full
throttle position.
2. During the programming process, acoustic signals are output via the motor; the red LED lights
up parallel to each tone.
3. The green LED flashes rapidly when the controller is overheated and the overtemperature
protection has been activated. The red LED flashes rapidly when the undervoltage protection
has been activated.
Problem
Possible cause Solution
After switching on,
no tones are
emitted and the
LEDs do not
light up.
No battery voltage is
detected by the controller
or the battery is conntected
with the wrong polarity.
Check the connection between controller
and battery, replace the connectors. If
the polarity is incorrect, disconnect the
controller from the battery immediately,
otherwise it will be destroyed.
After switching on
the motor does not
work, a warning
tone with a short
tone (B-) sounds
at an interval of 1
sec.
The input voltage is
too high or too low,
or the controller is too
hot (above 80°C)
Check the voltage level of the drive battery.
Check the controller temperature and the
water cooling, possibly use a larger
controller.
You pull the throttle
but the boat
reverses.
The motor runs upside
down, it is connected
incorrectly.
Replace any two connecting cables between
controller and motor.
The boat does not
reverse.
The correct mode
(forward and backward)
is not set. The controller
does not recognize the
neutral point.
Check the driving mode and set it to
"forward and reverse".
Calibrate the throttle / throttle control stick
according to these instructions.
The motor stops
during operation.
The undervoltage drop
is triggered or the over-
temperature protection has
taken effect.
Insert a fully charged battery. The controller
temperature is too high, let the controller
cool down.
06. LED Indications
07. Problem solutions
Motor does not start
normally, abnormal
running behaviour
of the motor.
One or more connections
between controller and
motor are faulty. The
motor is defective.
Please check all connections. Test the
functions with another ESC or motor
with very low gas setting, otherwise the
controller could be destroyed.

Modellbau Lindinger GmbH, Industriestraße 10, 4565 Inzersdorf im Kremstal, Österreich
Telefon: +43(0)7582/81313-0 , info@robbe.com, UID Nr.: ATU69266037
„robbe Modellsport“ ist eingetragenes Markenzeichen der Modellbau Lindinger GmbH
Irrtum, Druckfehler und technische Änderungen vorbehalten. Copyright Modellbau Lindinger 2018
Kopie und Nachdruck, auch auszugsweise, nur mit schrilicher Genehmigung.
Service-Adresse
Über Ihren Fachhändler oder:
Modellbau Lindinger GmbH, Industriestraße 10, 4565 Inzersdorf im Kremstal, service@lindinger.
at,43(0)7582-81313-0
www.robbe.com
1. une ou plusieurs connexions
entre le régulateur et le moteur
sont défectueuses.
2. le moteur est défectueux
1. Veuillez vérifier toutes les connexions à souder.
2. Tester les fonctions avec un autre ESC et puissance
moteur au minimum.
Nous ne pouvons pas surveiller les conditions et les méthodes d'installation, de fonctionnement,
d'assemblage, d'utilisation et d'entretien de ce produit. Par conséquent, nous n'acceptons aucune
responsabilité pour les pertes, dommages ou coûts résultant d'une utilisation et d'un
fonctionnement incorrects ou liés d'une manière ou d'une autre à une utilisation et à un
fonctionnement incorrects. Dans la mesure permise par la loi, l'obligation de payer des
dommages-intérêts, pour quelque raison juridique que ce soit, est limitée à la valeur facturée de
nos marchandises directement impliquées dans l'événement.
Ce produit est accompagné d'une garantie de 24 mois. Notre facture sert de preuve pour le début
et la fin de l'expiration de cette garantie. Les réparations éventuelles ne prolongent pas la période
de garantie. Les conditions de garantie légales s'appliquent. Pour les pays où une expédition non
gratuite n'est pas possible, nous vous rembourserons les frais de port par la suite.
11. Déni de responsabilité
12. Garantie
Le moteur ne démarre pas
normalement,
comportement de
fonctionnement anormal
du moteur.
Le boitier de
programmation continue à
afficher
"CONNECTING ESC"
même si la connexion a
été établie.
Les deux connexions de l'ESC
sont connectées au mauvais port
du boîtier de programmation LCD.
Vérifiez soigneusement les connexions. Assurez-
vous que tout soit bien connecté. Suivez les
instructions d'utilisation.
14 von 14
"robbe Modellsport" est une marque déposée de Modellbau Lindinger GmbH
Sous réserve d'erreurs, de fautes d'impression et de modifications techniques.
Copyright Modellbau Lindinger 2018 Copie et réimpression, même sous forme d'extraits,
uniquement sous autorisation écrite.
www.robbe.com
Rev.4/2018/SM
Operating Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Page
9
3. Protection against signal loss:
If no valid signal is registered by the receiver for a time of 0.1 sec. the controller switches the
motor off. The controller will not restart until valid input signals are detected again. We
recommend activating a Fail Safe function for the gas channel on the transmitter, which should
be set so that the engine is switched off.
The controllers are equipped with two LEDs, one red and one green.
1. When the throttle is pushed beyond the neutral range, the red LED lights up continuously and
the engine starts to rotate. The green LED also lights up as soon as the throttle lever is in full
throttle position.
2. During the programming process, acoustic signals are output via the motor; the red LED lights
up parallel to each tone.
3. The green LED flashes rapidly when the controller is overheated and the overtemperature
protection has been activated. The red LED flashes rapidly when the undervoltage protection
has been activated.
Problem
Possible cause Solution
After switching on,
no tones are
emitted and the
LEDs do not
light up.
No battery voltage is
detected by the controller
or the battery is conntected
with the wrong polarity.
Check the connection between controller
and battery, replace the connectors. If
the polarity is incorrect, disconnect the
controller from the battery immediately,
otherwise it will be destroyed.
After switching on
the motor does not
work, a warning
tone with a short
tone (B-) sounds
at an interval of 1
sec.
The input voltage is
too high or too low,
or the controller is too
hot (above 80°C)
Check the voltage level of the drive battery.
Check the controller temperature and the
water cooling, possibly use a larger
controller.
You pull the throttle
but the boat
reverses.
The motor runs upside
down, it is connected
incorrectly.
Replace any two connecting cables between
controller and motor.
The boat does not
reverse.
The correct mode
(forward and backward)
is not set. The controller
does not recognize the
neutral point.
Check the driving mode and set it to
"forward and reverse".
Calibrate the throttle / throttle control stick
according to these instructions.
The motor stops
during operation.
The undervoltage drop
is triggered or the over-
temperature protection has
taken effect.
Insert a fully charged battery. The controller
temperature is too high, let the controller
cool down.
06. LED Indications
07. Problem solutions
Motor does not start
normally, abnormal
running behaviour
of the motor.
One or more connections
between controller and
motor are faulty. The
motor is defective.
Please check all connections. Test the
functions with another ESC or motor
with very low gas setting, otherwise the
controller could be destroyed.
Operation Manual
RO-Control NAVY Series
No.8721
No.8722
No.8723
No.8724
Page
10
We cannot monitor the conditions and methods of installation, operation, assembly, use and
maintenance of this product. Therefore, we accept no liability whatsoever for losses, damages or
costs arising from or in any way connected with incorrect use and operation. To the extent
permitted by law, the obligation to pay damages, for whatever legal reason, is limited to the invoice
value of our goods directly involved in the event.
This product comes with a 24 month warranty. Our invoice serves as proof of the beginning and
expiry of this warranty. Possible repairs do not extend the warranty period. The statutory warranty
conditions apply. For example, you may only have used the product properly but not opened it. In
the event of a warranty repair, return the product to us freight collect with a detailed description of
the fault. The addresses for a freight collect shipment are enclosed with the shipment package. For
countries where an unfree shipment is not possible, we will refund the postage costs afterwards.
Have fun with your new controller for rc-boats!
08. Disclaimer of liability
09. Warranty
Modellbau Lindinger GmbH
Industriestrasse 10
4565 Inzersdorf im Kremstal
AUSTRIA
Modellbau
This product is not a toy. Operate only under the
direct supervision of adults
Made in China
+14
2
www.robbe.com
/